Paragon 项目:ESP32 无人机!

上周,我们发表了一篇关于 2023 年 ESP32 十佳项目.显然,我们抢先了一步,因为就在一天之后,约书亚-伯德(Joshua Bird)分享了 2023 年最酷的 ESP32 项目:利用动作捕捉系统自主飞行的 ESP32 无人机!
最重要的是,约书亚分享了项目的所有细节,并将其开放源代码。

这个项目相当复杂,但约书亚却让它看起来简单得令人发指,证明了这是一个经过深思熟虑的项目。
硬件设施
说到硬件,有两点需要考虑。首先是动作捕捉系统。其次是无人机本身。
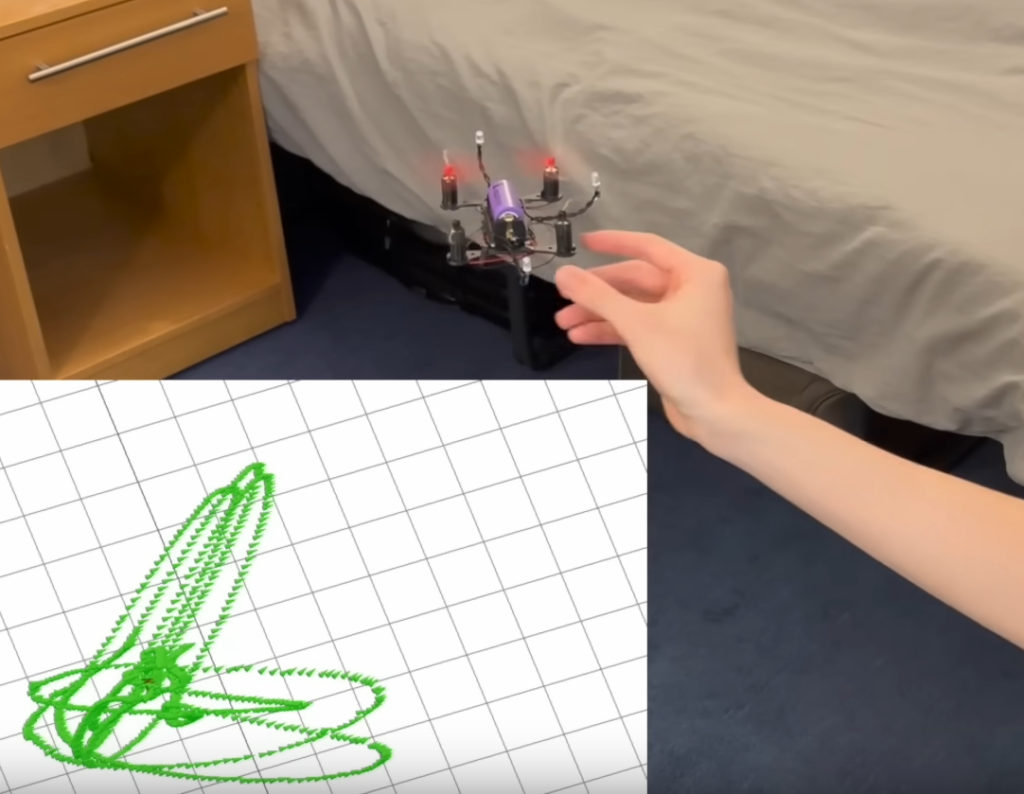
动作捕捉系统依靠四台摄像机跟踪红外线标记。然后,它们就能确定无人机的位置,并将其重新定位。
更酷的是,动作捕捉系统能够同时定位多架无人机。因此,正如约书亚所说,你可以创建一个无人机群。
通过这种设置,无人机可以自主移动到选定的位置。
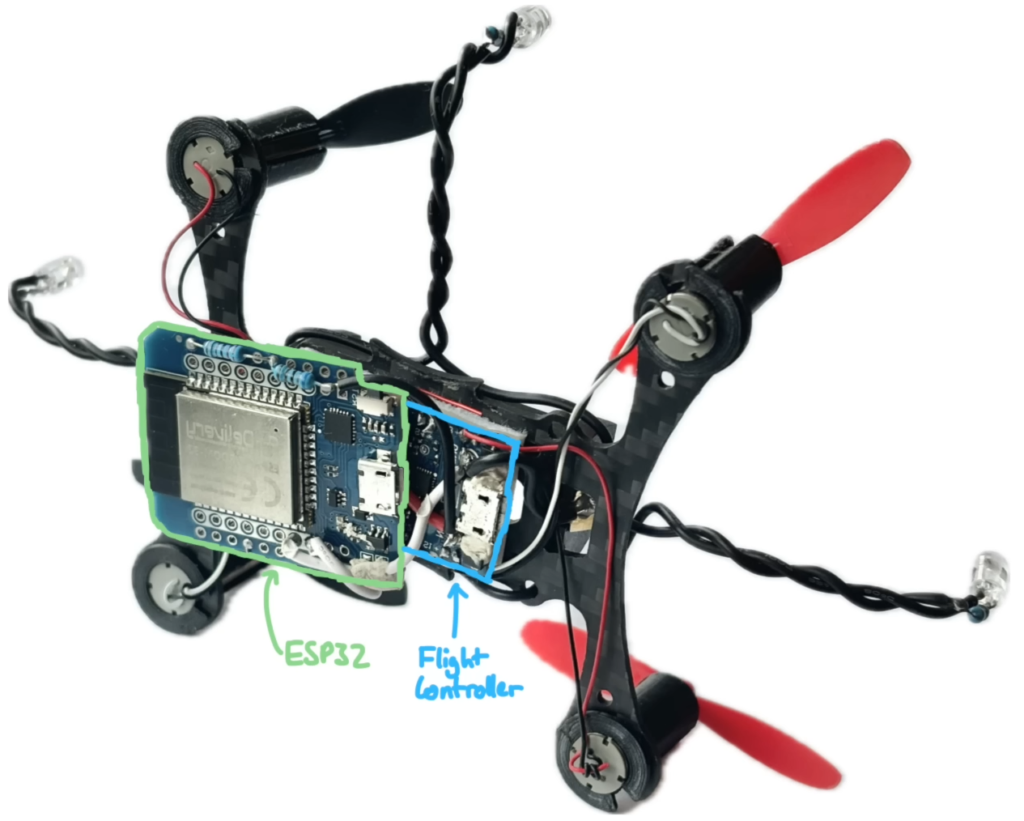
现在让我们来看看无人机,它主要围绕着一个 ESP32 和一个 F3 EVO Micro Brush 飞行控制板。
如果您有兴趣自己组装这个装置,并希望获得必要部件的完整明细表,那您就走运了!约书亚非常友好地将组件和价格(含链接)列在了 GitHub 讨论页面:
| 装置 | 价格 | 名称 |
|---|---|---|
| 飞行控制器 | $23 | 运行 Betaflight 的 F3 EVO 微型有刷飞行控制器 |
| 机架 电机和道具 | $13 | 通用 95mm 有刷无人机框架、8520 有刷电机、55mm 螺旋桨 |
| 电池 | $5 | YDL 18350(1100mah,9A) |
| 电池座 | $0.5 | 1S 18350 电池座 |
| 红外标记 | $0.1 | 3 毫米红外发光二极管(需要用砂纸打磨表面,使其均匀发光,而不是只向上发光) |
| ESP32 接收器 | $4 | WEMOS D1 迷你 ESP32 USB-C |
正如您所看到的,您可以在不花一分钱的情况下设置这些功能!
不仅如此,约书亚还包括 .stl文件 如果你想自己 3D 打印无人机部件,请访问 GitHub 上的 "3D 打印 "页面。这样,你就可以马上拥有自己的无人机群了。
如果你想省钱,最困难的可能是为动作捕捉系统设置摄像机。约书亚使用 PlayStation Eye 相机。不过,虽然它们很便宜,但您必须用红外滤光片替换红外截止滤光片。
毕竟,它们的关键在于捕捉红外线。
在这里,约书亚将软盘上的红外线条切割成红外滤光片,纯粹的独创性在这里大放异彩。
软件
约书亚用 Python 编写了后台程序。Python 脚本使用 OpenCV、SciPy Optimizer 和 NumPy 来确定摄像机的位置,并对无人机的位置进行三角测量。
后台可直接与摄像机通信,也可与墙上的 ESP32 通信,后者通过 ESP-NOW 协议作为收发器与每架无人机上的 ESP32 通信。
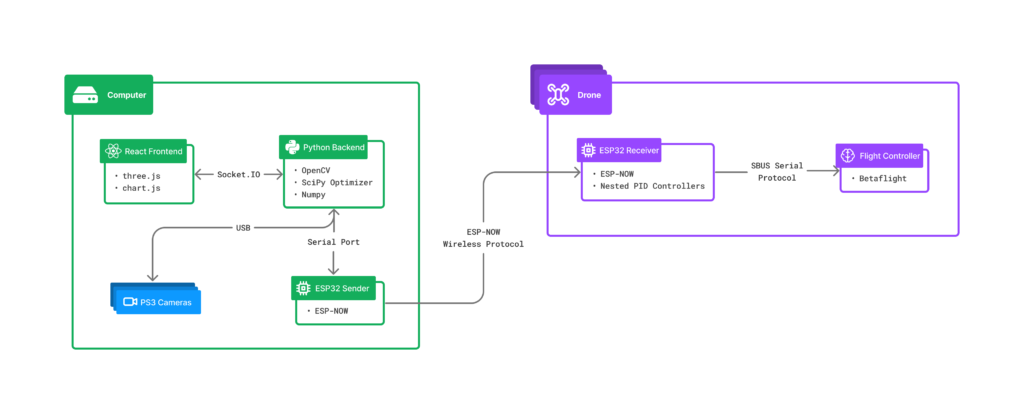
后端还与 Joshua 用 React 编写的前端通信,以便有一个简单的网络界面来控制一切。
总结
这个项目的创造力不言而喻。正如有人在 睿迪特(Reddit)公司我们将以最大的兴趣关注你的职业生涯"。我迫不及待地想知道约书亚接下来会分享什么,我相信我可以代表所有人说这句话!
请务必观看视频,乔舒亚会在视频中详细介绍:
您还可以前往 GitHub 页面.其中包括所有代码和 .stl 文件,以及一些关于如何自行设置的信息。
如果您想查看我们所有的 Paragon 项目,可以点击下面的按钮查看!
如果您还没有订阅,请务必订阅我们的时事通讯。我们会分享本系列中的许多超酷项目。
您会如何处理 ESP32 无人机群?