Raspberry Piプロジェクト:現代的なソリューションには、より現代的なソリューションが必要です!
今週は モダン Raspberry Piプロジェクト!
現代の問題には現代の解決策が必要だ」というミームを見たことがあるだろうか?
では、その現代的な解決策が現代的な問題を引き起こしたらどうなるか?
それなら、最新のソリューションが必要だ。
したがって、最新のソリューションには最新のソリューションが必要なのだ。
しかし、こうした問題は非常に些細なものであるため、メーカーがわざわざ解決策を用意してくれないこともある。
幸いなことに、ラズベリーパイ愛好家である私たちの創意工夫は無限である。

エンジン自動始動停止を無効にする
ガソリン価格が高騰している昨今、燃費はかなり重要だ。
自動車メーカーはその功績を称え、アイドリングストップを検知するとエンジンを停止するソリューションを開発した。これは停車中のガソリンの節約に大いに役立つ。
でも、つけないほうがいいという人もいるし、その理由はわかる。
しばらく前、私は最新のレンタカーに乗っていた。オートストップ・スタート・システムが有効になっていたので、信号が青になる前にエンジンを始動できるよう、ブレーキ圧を "計画 "しなければならなかった。
時々、忘れてしまって、グリーンに長く居座ることもあった。アクセルを強く踏むことでそれを補うんだ。お勧めできない。
自動車メーカーによっては、オートストップ・スタート機能を無効にする選択肢を与えていない。無効にしたければ、運転するたびにボタンを押さなければならない。
もう違う!
プロジェクト概要
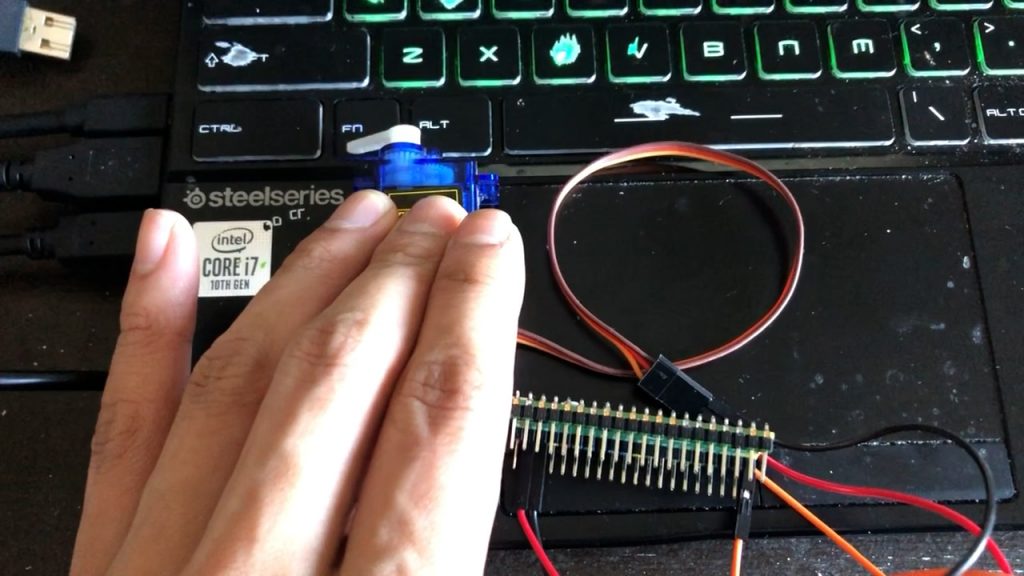
上のビデオでご覧いただいているのは市販品ですが、Raspberry Pi PicoとSG90サーボで簡単に実現できます。Raspberry Pi Picoの電源は、車のUSBポートから供給できる。
基本的なMicroPythonのコードはこのようになっており、サーボの信号線をGPIO 16に接続したと仮定している。
from time import sleep
from machine import Pin
from machine import PWM
pwm = PWM(Pin(16))
pwm.freq(50)
pwm.duty_ns(2000000)
sleep(0.5)
pwm.duty_ns(500000)
これにはいくつかの課題がある:
まず、サーボの角度を調整する必要がある。これは pwn_duty_ns単位はナノ秒。
200万ナノ秒(2,000,000)は1回転に相当し、500,000は逆方向に1回転する。
結局、サーボのフルレンジではなく、100万から200万ナノ秒しか使わなかった。
次に、車のスタート・ストップ機能の解除方法を知っておく必要がある。長押しが必要な車もあるので、その場合は、スタート・ストップを解除するために、スタート・ストップを調整する必要がある。 睡眠 の長さだ。
3つ目は、エンジンがかかっているときだけ作動させ、ラジオをスタートさせたときは作動させないことです。エンジンがかかっていることをピコに伝える簡単な方法がないため、これが最大の難関だろう。
しかし、同じプロジェクト、つまりRaspberry Pi Picoでサーボを操作することは、実はスイッチのトグルなど、他の多くのプロジェクトにとても有益なのです。私はこの方法を使って ベッドに寝たまま、寝室の明かりを消す.
また、ランダムなボタン(INSERTのようなもの)を押してスクリーンセーバーを停止させることもできる。
オープンモアGPSロボット芝刈り機
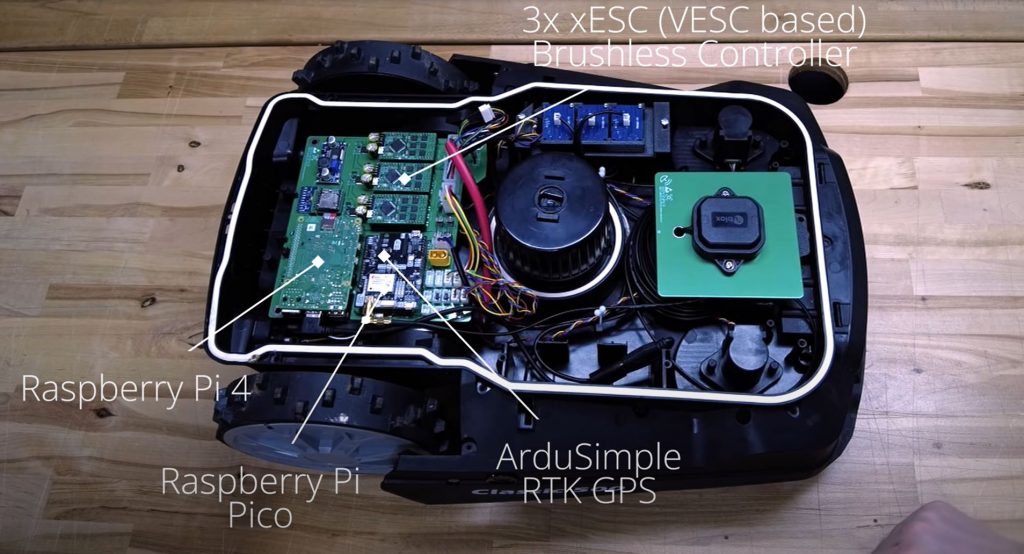
「ロボット芝刈り機は最悪だ!」。
そう語るのは、オープンモアの開発者クレメンス・エルフラインだ。
彼の不満は、このロボモアがあまりにも間抜けだということだ。
「基本的に、これらのボットは芝生の境界線にぶつかるまでランダムな方向に走り、ランダムな時間回転し、それを繰り返す。もっとうまくやれると思う!"
そこでクレメンスは、ランダムな芝刈り方法ではなく、GPSを統合することでより正確なものを求めた。ここでの利点は、ロボ芝刈り機が自律的に裏庭まで移動し、そこで芝を刈ることもできることだ!
ロボ芝刈り機は、芝刈りの反復作業を軽減する現代的なソリューションだ。しかし、それだけでは不十分だ。
これを読んでいる理由を思い出してほしい......現代的なソリューションには、より現代的なソリューションが必要なのだ!
プロジェクト目標
クレメンスはYardForce Classic 500という市販品を使い、Raspberry Pi 4とRaspberry Pi Picoを設置した。
彼のコメントにあるように Githubこれが彼の目標だ:
自律的な芝刈り:当然ながら、芝刈り機は自動で芝を刈ることができなければならない。
- 安全性が高いこと:例えば、持ち上げられたり、墜落した場合に緊急停止するなど、安全でなければならない。
- 周辺ワイヤ不要:複数の刈り込みエリアに柔軟に対応したい。
- 低コスト:既製品の中級品よりも安価でなければならない。
- オープン:知識を共有し、他の人にもオープンモアを作ってもらいたい。
- 見た目がいい:オープンモアで芝を刈るのは恥ずかしいことではありません。
- 障害物を避ける:草刈り機は、草刈り中に障害物を検知して回避する必要があります。
- 雨の検知:悪天候を検知し、天候が回復するまで草刈りを一時停止できる装置でなければならない。
できるか?
クレメンスはDiscordグループを作り、毎日人々が参加している。
彼は、自分が何をしているのか分かっていない限り、それをすることは勧めない。
何か問題が起きても、彼のドアをノックしに来るなと、彼は免責条項で明白にしている。
オープンモアに参加する ディスコード または GitHub.
シャーロック、ウンチはしない:庭の犬のウンチを取り除く方法を考えすぎる
カレブ・オルソンは庭に糞をまき散らすコーギーを飼っている。
当初、彼は飼い犬のトゥインキーがウンチをした場所を目印にし、画像にマーキングするシステムを設計した。現代的な解決策
しかし、現代的なソリューションでは、携帯電話で場所を把握しなければならないため、「手間がかかりすぎる」ことが判明した。
では、彼は何をしたのか?ウンチの場所を示すレーザーを搭載したロボットアームを取り付けたのだ。
現代的なソリューションには、より現代的なソリューションが必要だ。
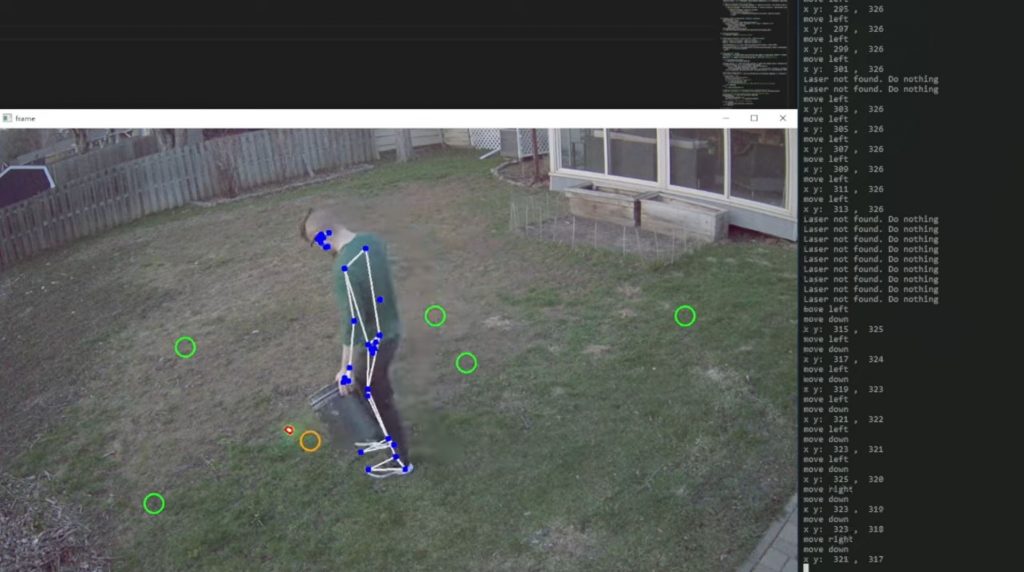

コンピューター・ビジョンは、ウンチのレーザー誘導を開始するため、この作業には欠かせない。腕を組むことで、コンピューターは最初のウンチスポットを指し示し、誘導システムをスタートさせる。
そして、ウンチを拾おうと腰をかがめると、OpenCVがそれを検知して次のウンチの場所に移動する。
何かプロジェクトはある?
PiCockpitニュースレターで紹介する面白いプロジェクトを見つけるために、RedditやTwitterなどのウェブサイトを毎日チェックしています。
パラゴン・プロジェクト・シリーズもご覧ください。 ここにある。
もし面白いプロジェクトをご存知でしたら、下にコメントを残してください👇。
このシリーズがお好きな方は、以下のニュースレターをご購読ください👇。