レゴ潜水艦とカメラRaspberry Piプロジェクト
今週も面白いRaspberry Piプロジェクトが目白押しです。
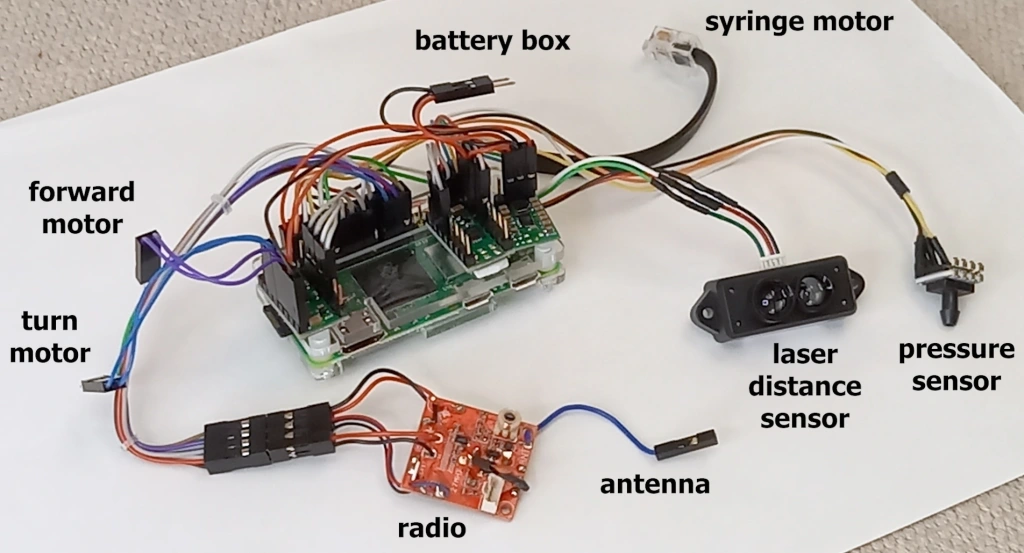
第一弾は、沈没、浮上、旋回、移動が可能なラジコン潜水艦です。潜水艦の心臓部には、Raspberry Pi Zero 2が搭載されています。
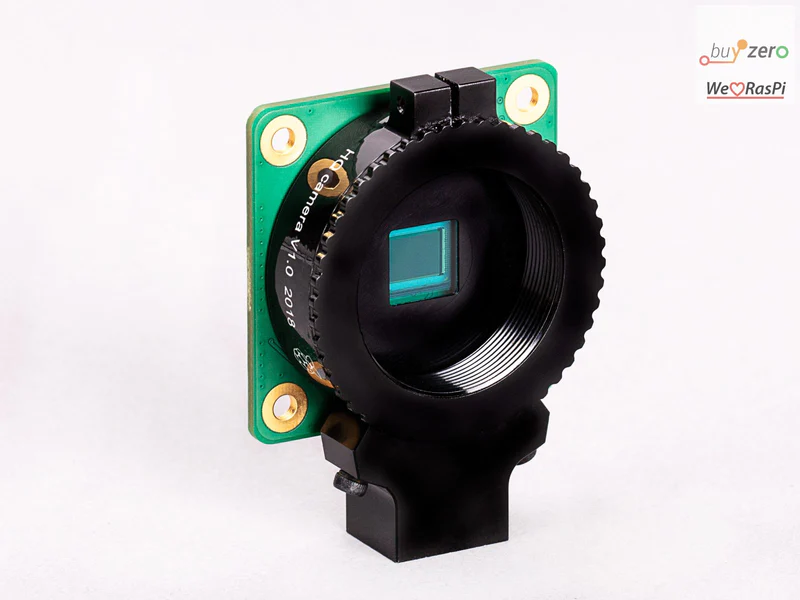
2つ目のプロジェクトは、ライカのカメラにちなんで名づけられた「Pieca」カメラです。Mマウントの交換レンズを使用し、Raspberry Pi 4と高画質イメージセンサーモジュールと組み合わせています。
Raspberry Pi Zero + レゴテクニックの潜水艦
4度目の正直 ブリック実験チャンネル (BEC)さんが、レゴテクニックのパーツとRaspberry Pi Zero 2を使って作成したものです。
BECが直面した最大の課題は、潜水艦を思い通りの深さに保つことだが、4回目のプロジェクトでは、注射器を使うことにした。過去3回が失敗したからだ。
"深度が安定しない "というのは、先に作った3隻の潜水艦、特に1号と3号では厄介なことだった。これらの潜水艦は、常に底にいるか水面にいるかのどちらかでした。克服すべき良い課題です。"
BECがRaspberry Piを潜水艦に組み込むまで
BECのRaspberry Pi Zero 2の主な用途は、潜水艦の深度を制御することです。
BECは当初、Raspberry Pi Picoを使いたかったが、Picoのフラッシュメモリは2MBと限られており、データロギングに必要な容量としては少なすぎた。
圧力センサーで圧力データを収集する

BECは、潜水艦に絶対圧センサーを使用していました。
BECは当初、相対圧センサーを使用していたが、データの信頼性が低かったため、絶対圧センサーのハネウェル社製SSCMANV030PA2A3に切り替えたのである。
圧力センサーで潜水艦の深さを知ることができます。
深度を測定する別の方法:レーザー距離センサー

BECは、底面からの距離を測定することで深さを測定する別の方法を見つけようと、Sparkfun TFMini-S Microレーザー距離センサーを組み込みました。
残念ながら、レーザーによる深度計測は、濁った海ではあまり信頼性が高くありません。BECは「データがバラバラで制御に使えない」というので、レーザー距離センサーはあまり使わなかった。
深さの決定方法

そして、深度センサーからのデータをもとに、シリンジを駆動させる。
注射器にはレゴテクニックのモーターが接続されており、注射器の押し込み具合、引き込み具合を記憶しています。
圧力センサーやレーザー距離センサーのデータから、シリンジの位置を計算し、深さのデータを取得し、PID制御出力を計算し、シリンジモーターを目標の深さまで駆動するプログラムをBECが作成したのです。
そして、BECはこうしてRaspberry Pi+レゴの潜水艦を作り上げたのです。 全10回のブログ記事はこちらでご覧いただけます。
ピーカカメラ

Tom Schuckerは、Raspberry Pi 4、Raspberry Pi高画質カメラ、DSIポートで接続した5インチディスプレイ、3Dプリントしたケースを使って、Piecaを作りました。システム全体は、PiSugarバッテリーシステムで駆動しています。
新しいレゴ潜水艦の写真を撮るのに理想的なRaspberry Piプロジェクトです!
その他、GPSモジュール、バッテリー残量計、ファイル転送を容易にするUSBメモリなど、嬉しい機能を搭載しています。

Mマウントのレンジファインダーレンズを使用可能
このプロジェクトの最大の魅力は、M39のレンジファインダーレンズを自由に使えることです。
この100年の間に、多くのレンズが生産されました。ロシア製のレンズはとても安く買えますし、ドイツ製も買えます。
これらのレンズは、オートフォーカスも自動絞りもないマニュアルカメラの時代に作られたものです。だから、昔のレンジファインダーと同じように、レンズで絞りを設定し、ピントを合わせることになる。
画像はすべて拡大表示されます
35mm判用のレンズをより小さなセンサーで使用すると、すべての画像が本質的にズームアップされることになります。
レンズは35mm×24mmの画像を映し出すものです。しかし、センサーはその35mm×24mmのイメージのうち、6mm×4.5mmしかとらえないかもしれません。つまり、すべての写真がトリミングされている(つまり、拡大されているように見える)のです。
トムは、レンズの焦点距離を半分にするフォーカルレデューサーを使用して補正しました。
ビデオ
Raspberry Piプロジェクトにご興味がおありですか?
パラゴン・プロジェクト・シリーズをご覧ください。 これ.
レゴの潜水艦とピーカカメラで何をする?