乐高潜水艇和摄像头树莓派项目
本周我们有一些有趣的 Raspberry Pi 项目。
第一个项目是一艘无线电遥控潜艇,可以下沉、浮出水面、转向和移动。潜艇的核心是一个 Raspberry Pi Zero 2。
第二个项目是以徕卡相机命名的 "Pieca "相机。Pieca 与 Leica 相机的主要相似之处在于使用了 M 卡口可更换镜头,然后将其与 Raspberry Pi 4 和高质量图像传感器模块配对使用。
Raspberry Pi Zero + 乐高 Technic 潜水艇
第四次的魅力 砖块实验频道 (BEC) 使用乐高 Technic 部件和 Raspberry Pi Zero 2 制作了这个项目。
BEC 面临的最大挑战是将潜艇保持在他希望的深度,但在第四个项目中,他决定使用注射器。过去三个项目失败的原因是
"不稳定的深度一直是我之前制造的三艘潜艇,尤其是 1 号和 3 号潜艇的一个困扰。这些潜艇总是要么在水底,要么在水面。这是一个很好的挑战"。
BEC 如何将 Raspberry Pi 集成到潜艇中
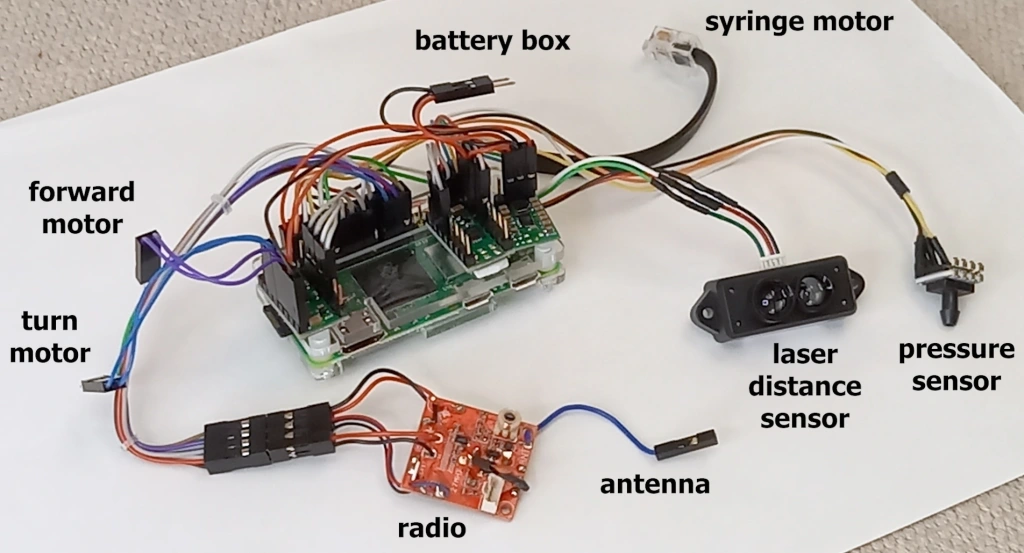
BEC 的 Raspberry Pi Zero 2 的主要用途是控制潜艇的深度。
BEC 最初想使用 Raspberry Pi Pico,但 Pico 的闪存只有 2MB,无法满足他的数据记录需求。
使用压力传感器收集压力数据

BEC 在潜艇中使用了一个绝对压力传感器。
BEC 最初使用的是相对压力传感器,但数据并不可靠,因此他改用了霍尼韦尔 SSCMANV030PA2A3 绝对压力传感器。
压力传感器可显示潜艇的深度。
测量深度的替代方法:激光测距传感器

BEC 集成了 Sparkfun TFMini-S 微型激光测距传感器,试图找到另一种通过测量与底部的距离来测量深度的方法。
遗憾的是,激光深度测量在浑水中并不十分可靠。BEC 说,"数据非常零散,无法真正用于控制",因此 BEC 并没有过多地使用激光测距传感器。
如何确定深度

深度传感器的数据随后用于驱动注射器。
注射器与乐高技术马达相连,马达可存储注射器推入或缩回的程度。
BEC 利用压力传感器和/或激光测距传感器的数据编写了一个程序,用于计算注射器的位置、获取深度数据、计算 PID 控制输出,然后驱动注射器电机达到目标深度。
这就是 BEC 制作树莓派和乐高潜水艇的过程。 您可以在这里阅读博文的 10 个部分。
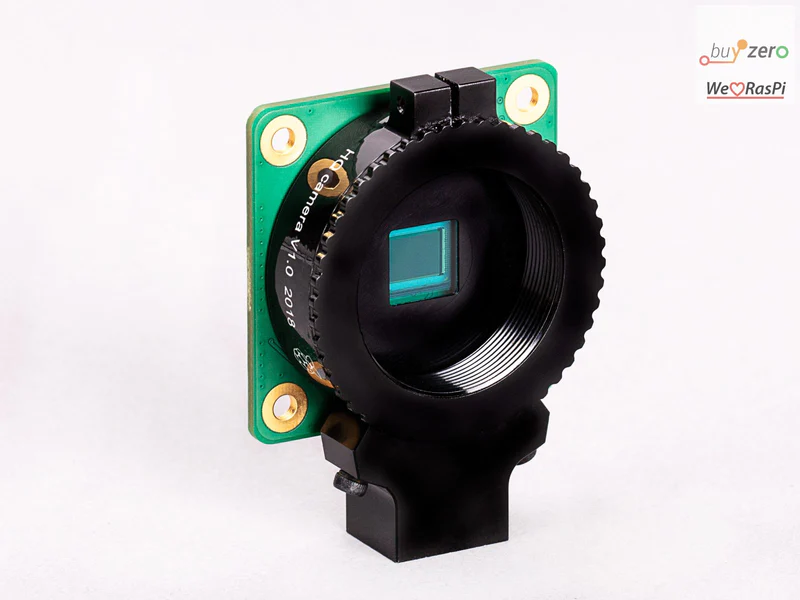
皮卡相机

汤姆-沙克使用 Raspberry Pi 4、Raspberry Pi 高质量摄像头、通过 DSI 端口连接的 5 英寸显示屏和 3D 打印外壳制作了他的 Pieca。整个系统由 PiSugar 电池系统供电。
这是一个理想的 Raspberry Pi 项目,现在可以为你酷酷的新乐高潜水艇拍照了!
该相机还有其他令人兴奋的功能,如 GPS 模块、电池寿命计和便于传输文件的 USB 手指驱动器。

使用任何 M 卡口测距仪镜头
这个项目的最大亮点是可以使用任何 M39 测距仪镜头。
在过去的一个世纪中,生产了许多这样的镜头。您可以买到非常便宜的俄罗斯制造的镜头,也可以买到德国制造的镜头。
这些镜头诞生于没有自动对焦或自动光圈的手动相机时代。因此,您必须在镜头上设置光圈和对焦,就像使用老式测距仪一样。
所有图片均已放大
在较小的传感器上使用 35mm 格式的镜头,意味着所有图像都会被放大。
可以这样想:镜头的作用是投射 35mm x 24mm 的图像。然而,传感器可能只能捕捉到 35mm x 24mm 图像中的 6mm x 4.5mm。这意味着所有的照片都是经过裁剪的(因此看起来像是放大的)。
汤姆通过使用焦距缩小器将镜头焦距减半来进行补偿。
视频
对更多 Raspberry Pi 项目感兴趣?
您可以查看我们的百利宫项目系列 这里.
有了乐高潜水艇和派卡相机,你会做什么?