Lego Submarine & Camera : Projets Raspberry Pi
Cette semaine, nous avons des projets Raspberry Pi intéressants.
Le premier projet est un sous-marin radiocommandé qui peut couler, faire surface, tourner et se déplacer. Au cœur du sous-marin se trouve un Raspberry Pi Zero 2.
Le second projet est un appareil photo "Pieca", nommé d'après un appareil photo Leica. La principale similitude entre le Pieca et un Leica est l'utilisation d'un objectif interchangeable à monture M, qui est ensuite couplé au Raspberry Pi 4 et au module de capteur d'image de haute qualité.
Raspberry Pi Zero + sous-marin Lego Technic
La quatrième fois est la bonne pour Canal Brick Experiment (BEC), qui a créé ce projet en utilisant des pièces Lego Technic et un Raspberry Pi Zero 2.
Le plus grand défi auquel BEC a dû faire face a été de maintenir les sous-marins à la profondeur voulue, mais pour le quatrième projet, il a décidé d'utiliser une seringue. Les trois précédents ont échoué pour les raisons suivantes
"La profondeur instable a été un problème avec les trois sous-marins que j'ai construits précédemment, en particulier les sous-marins 1 et 3. Ces sous-marins étaient toujours soit au fond, soit à la surface. Un bon défi à relever".
Comment BEC intègre le Raspberry Pi dans le sous-marin
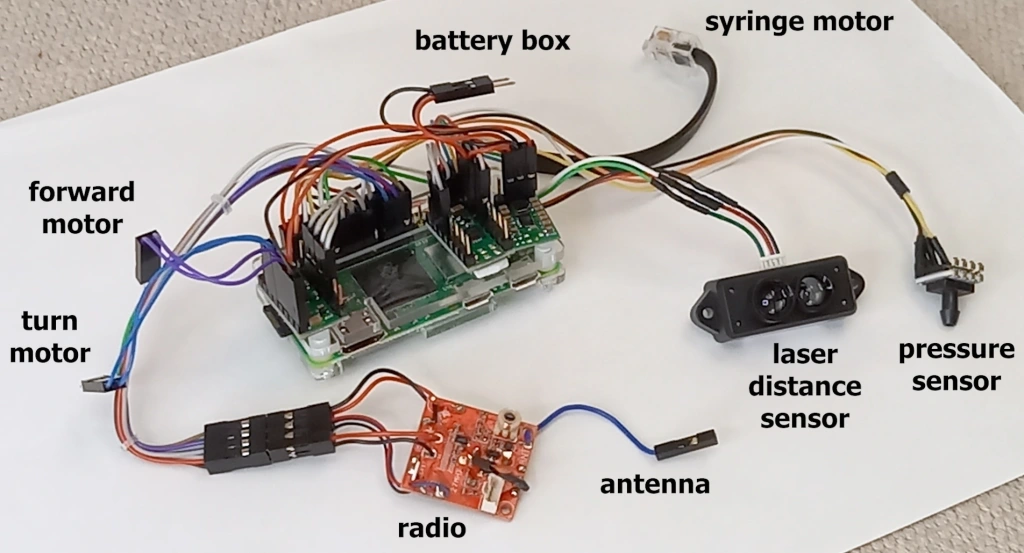
L'objectif principal du Raspberry Pi Zero 2 de BEC est de contrôler la profondeur du sous-marin.
BEC souhaitait initialement utiliser un Raspberry Pi Pico, mais la mémoire flash limitée à 2 Mo du Pico était trop faible pour ses besoins en matière d'enregistrement de données.
Collecte de données de pression à l'aide d'un capteur de pression

BEC a utilisé un capteur de pression absolue dans le sous-marin.
BEC a d'abord utilisé un capteur de pression relative, mais les données n'étaient pas fiables. Il a donc opté pour un capteur de pression absolue Honeywell SSCMANV030PA2A3.
Le capteur de pression indique la profondeur du sous-marin.
Autre moyen de mesurer la profondeur : capteur de distance laser

BEC a intégré un capteur de distance laser Sparkfun TFMini-S Micro pour tenter de trouver une autre façon de mesurer la profondeur en mesurant la distance par rapport au fond.
Malheureusement, les mesures de profondeur au laser ne sont pas très fiables dans les eaux boueuses. Le CEB a déclaré que "les données sont très inégales et ne sont pas vraiment utilisables pour le contrôle", de sorte que le CEB n'a pas beaucoup utilisé le capteur de distance laser.
Comment la profondeur est-elle déterminée ?

Les données des capteurs de profondeur sont ensuite utilisées pour piloter la seringue.
La seringue est reliée à un moteur Lego Technic qui enregistre le degré d'enfoncement ou de rétraction de la seringue.
Avec les données du capteur de pression et/ou du capteur de distance laser, BEC a écrit un programme qui calcule la position de la seringue, obtient les données de profondeur, calcule la sortie de contrôle PID, puis actionne le moteur de la seringue jusqu'à la profondeur cible.
C'est ainsi que BEC a construit son sous-marin Raspberry Pi + Lego. Vous pouvez lire l'article de blog en 10 parties ici.
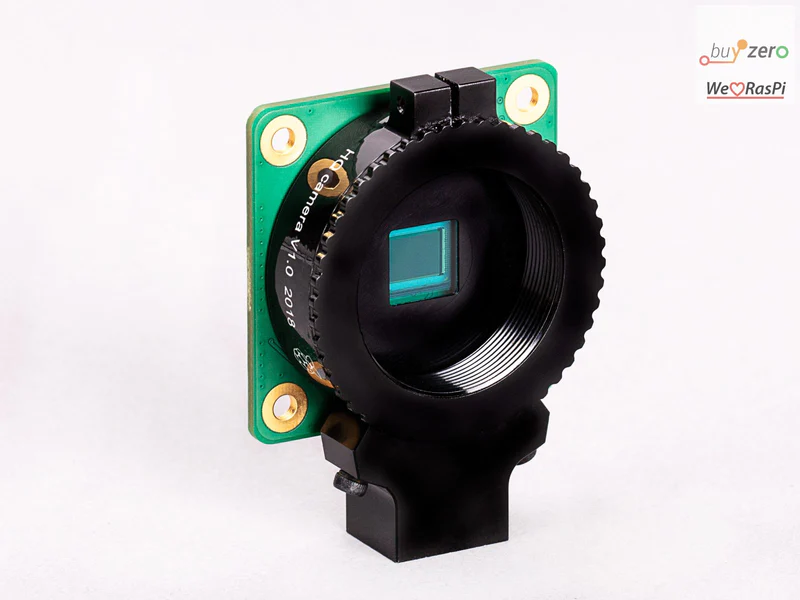
Caméra Pieca

Tom Schucker a construit son Pieca en utilisant un Raspberry Pi 4, le Raspberry Pi High Quality Camera, un écran 5″ qui se connecte via le port DSI et un boîtier imprimé en 3D. L'ensemble du système est alimenté par le système de batterie PiSugar.
C'est le projet Raspberry Pi idéal pour prendre des photos de ton nouveau sous-marin Lego !
L'appareil photo présente également d'autres caractéristiques intéressantes telles qu'un module GPS, une jauge d'autonomie de la batterie et une clé USB pour faciliter le transfert de fichiers.

Utilisez n'importe quel objectif télémétrique à monture M
La meilleure partie de ce projet est la possibilité d'utiliser n'importe quel objectif télémétrique M39.
Au cours du siècle dernier, un grand nombre de ces lentilles ont été produites. Les lentilles fabriquées en Russie sont très bon marché, tout comme celles fabriquées en Allemagne.
Ces objectifs ont été créés à l'époque des appareils photo manuels, sans autofocus ni ouverture automatique. Vous devez donc régler l'ouverture et faire la mise au point sur l'objectif, comme vous le feriez avec un ancien télémètre.
Toutes les images sont agrandies
L'utilisation d'un objectif conçu pour le format 35 mm sur un capteur plus petit signifie que toutes les images sont intrinsèquement zoomées.
Pensez-y de la manière suivante : les objectifs sont censés projeter une image de 35 mm x 24 mm. Cependant, le capteur ne peut capturer que 6 mm x 4,5 mm de cette image de 35 mm x 24 mm. Cela signifie que toutes les photos sont recadrées (et donnent donc l'impression d'être zoomées).
Tom a compensé en utilisant un réducteur de focale qui divise par deux la longueur focale des objectifs.
Vidéo
Intéressé par d'autres projets Raspberry Pi ?
Vous pouvez consulter notre série de projets Paragon ici.
Que ferais-tu avec un sous-marin lego et une caméra pieca ?