Подводная лодка и камера Lego: Проекты Raspberry Pi
На этой неделе у нас есть несколько интересных проектов Raspberry Pi.
Первый проект - это радиоуправляемая подводная лодка, которая может погружаться, всплывать, поворачивать и двигаться. Сердцем субмарины является Raspberry Pi Zero 2.
Второй проект - камера "Pieca", названная в честь фотоаппарата Leica. Основное сходство между Pieca и Leica заключается в использовании сменного объектива M-mount, который затем сопрягается с Raspberry Pi 4 и модулем высококачественного датчика изображения.
Raspberry Pi Zero + подводная лодка Lego Technic
Четвертый раз для Канал "Кирпичный эксперимент (BEC), который создал этот проект, используя детали Lego Technic и Raspberry Pi Zero 2.
Самая большая проблема, с которой столкнулся BEC, - это удержание подводных лодок на нужной глубине, но для четвертого проекта он решил использовать шприц. Три предыдущих провалились, потому что,
"Нестационарная глубина доставляла неудобства трем подводным лодкам, которые я сделал ранее, особенно подлодкам 1 и 3. Эти субмарины всегда находились либо на дне, либо на поверхности. Хорошая задача, которую нужно было решить".
Как BEC интегрирует Raspberry Pi в подводную лодку
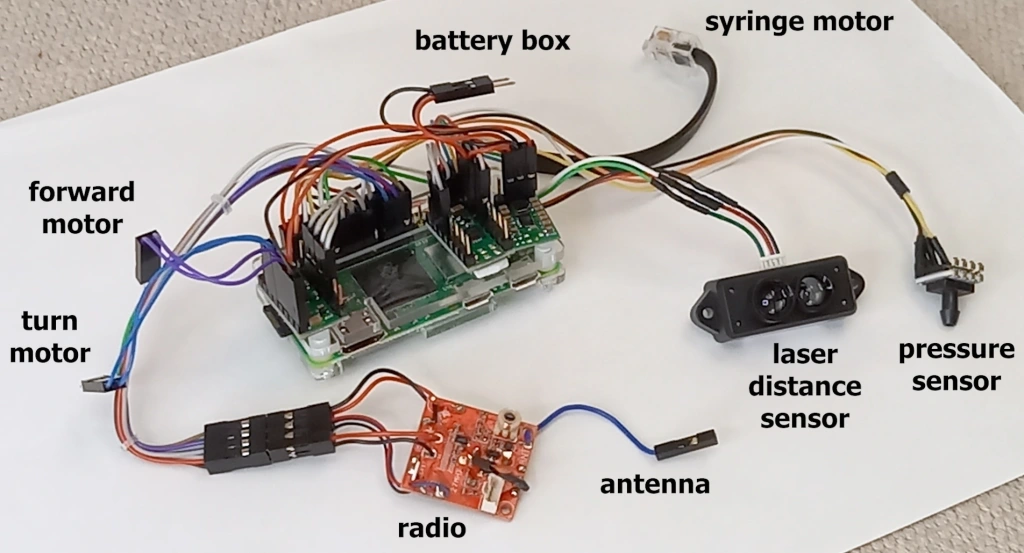
Основное назначение Raspberry Pi Zero 2 от BEC - управление глубиной погружения подводной лодки.
Изначально BEC хотел использовать Raspberry Pi Pico, но ограниченный объем флэш-памяти Pico в 2 МБ был слишком мал для его потребностей в регистрации данных.
Сбор данных о давлении с помощью датчика давления

Компания BEC использовала в подводной лодке датчик абсолютного давления.
Изначально BEC использовал датчик относительного давления, но его данные оказались недостоверными, поэтому он заменил его на Honeywell SSCMANV030PA2A3, который является датчиком абсолютного давления.
Датчик давления показывает, на какой глубине находится подводная лодка.
Альтернативный способ измерения глубины: лазерный датчик расстояния

BEC интегрировал лазерный датчик расстояния Sparkfun TFMini-S Micro в попытке найти другой способ измерения глубины путем измерения расстояния от дна.
К сожалению, лазерные измерения глубины не очень надежны в мутной воде. По словам BEC, "данные очень обрывочны и не очень пригодны для контроля", поэтому BEC не очень часто использовала лазерный датчик расстояния.
Как определяется глубина

Данные с датчиков глубины используются для управления шприцем.
Шприц соединен с мотором Lego Technic, который запоминает, насколько сильно задвинут или выдвинут шприц.
Используя данные от датчика давления и/или лазерного датчика расстояния, компания BEC написала программу, которая рассчитывает положение шприца, получает данные о глубине, рассчитывает выход ПИД-регулирования, а затем приводит двигатель шприца в движение до заданной глубины.
Вот так BEC построил свою подводную лодку из Raspberry Pi + Lego. Вы можете прочитать 10 частей статьи в блоге здесь.
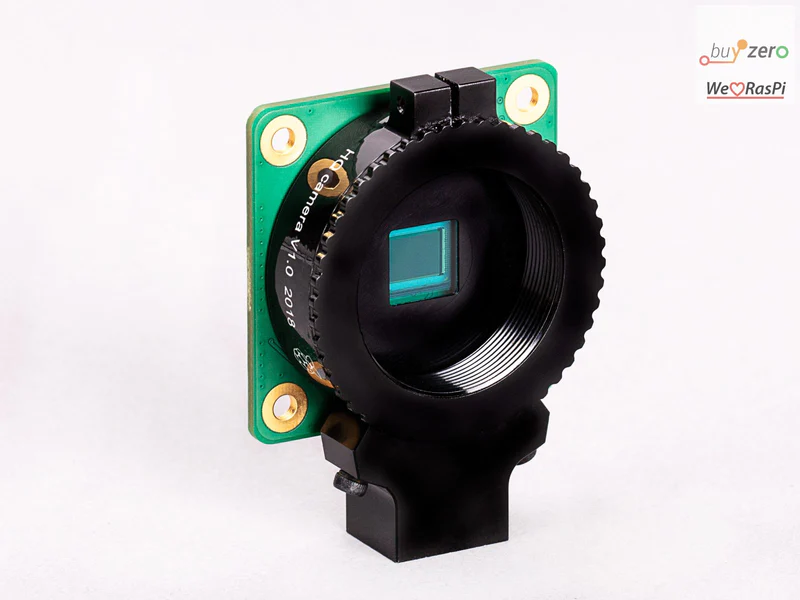
Камера Pieca

Том Шукер построил свой Pieca, используя Raspberry Pi 4, высококачественную камеру Raspberry Pi, 5″ дисплей, подключаемый через порт DSI, и 3D-печатный корпус. Вся система питается от аккумуляторной системы PiSugar.
Это идеальный проект для Raspberry Pi, чтобы теперь делать фотографии вашей новой крутой подводной лодки Lego!
Кроме того, камера оснащена и другими интересными функциями, такими как модуль GPS, индикатор заряда батареи и USB-накопитель для удобства переноса файлов.

Используйте любой дальномерный объектив M-mount
Самое лучшее в этом проекте - возможность использовать любой дальномерный объектив M39.
За последнее столетие было выпущено множество таких объективов. Вы можете купить объективы российского производства очень дешево, а также немецкого.
Эти объективы были созданы в эпоху ручных камер без автофокуса и автоматической диафрагмы. Поэтому вам приходилось устанавливать диафрагму и фокусироваться на объективе, как и в случае со старым дальномерным фотоаппаратом.
Все изображения увеличены
Использование объектива, предназначенного для формата 35 мм, на меньшей матрице означает, что все снимки будут изначально увеличены.
Подумайте об этом так: объективы предназначены для проецирования изображения размером 35 мм x 24 мм. Однако матрица может захватить только 6 мм x 4,5 мм из этого изображения 35 мм x 24 мм. Это означает, что все снимки получаются обрезанными (и, следовательно, выглядят так, будто они увеличены).
Том компенсировал это с помощью фокусного редуктора, уменьшающего фокусное расстояние объективов вдвое.
Видео
Интересуетесь другими проектами Raspberry Pi?
Вы можете ознакомиться с нашей серией проектов Paragon здесь.
Что бы вы сделали с подводной лодкой lego и камерой pieca?