Debugging PiCockpit Client problems

Problem: Pi is shown as offline
Check whether the picockpit-client service is active on your Raspberry Pi. Please open a terminal and write:
sudo service picockpit-client statusThis will give you the following output, if picockpit-client is active and working correctly:
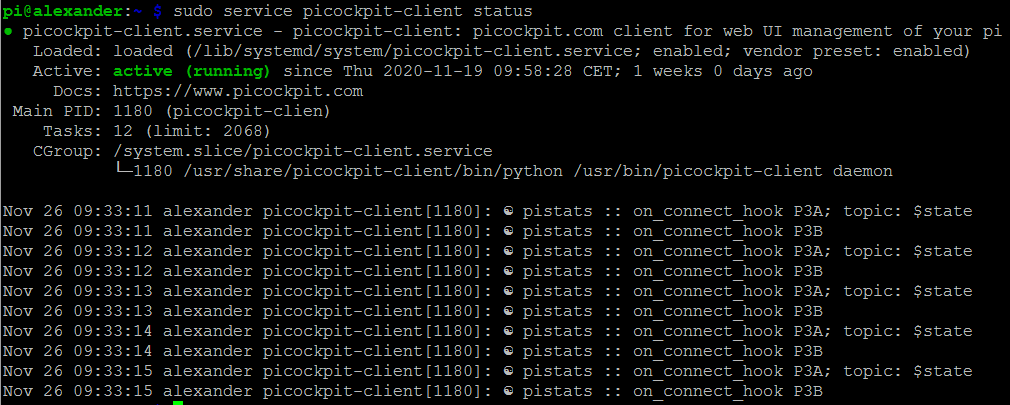
Investigate the log output next.
You can dump it to a file with the following command to send it to us, so we can analyze the problem:
sudo journalctl -u picockpit-client.service -n 1000 > /tmp/log.txtThis will output a log provided by journalctl, which will look something like this:
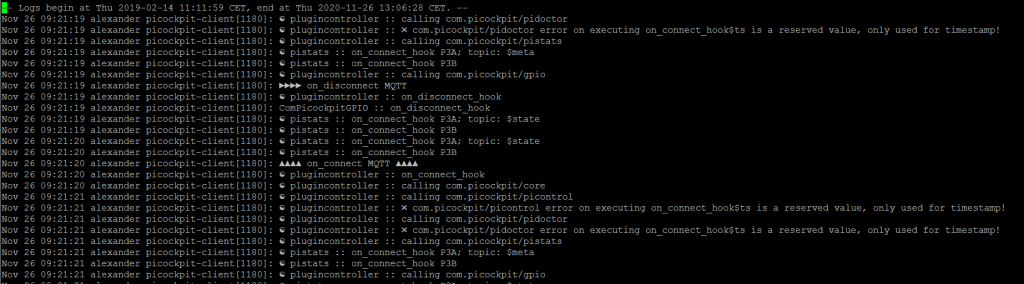
You can then contact us through the PiCockpit Contact page and send us the log.
Reporting problems
When reporting a different problem, or one which can’t be resolved with the tips on this page, please be sure to include screenshots of the PiCockpit webinterface, and the logs of the web interface and the picockpit-client.
Log for picockpit-client
Here are instructions of how to access the picockpit-client log on Raspberry Pi OS on the Raspberry Pi’s command line:
sudo su
journalctl -u picockpit-client --since "4 days ago" > /tmp/picockpit-client2.txtPlease attach the log output to your email.
Log for the Web Interface
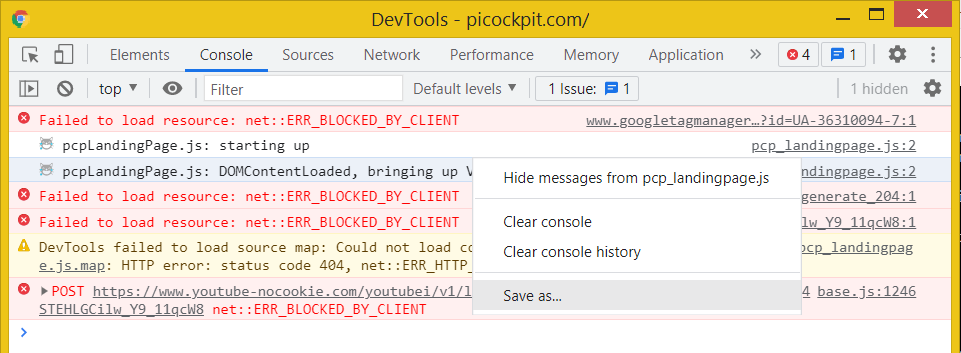
To support us with further debugging, please also open the Developer Tools (on Chrome: Ctrl + Shift + I), and send us the output of the JavaScript console. Right-click one of the log lines, and select “Save as” to save a log file.
Note: if you use Firefox, Edge, or another browser, the way to access the log output will vary.
Conclusion
These are the main issues that our customers have come across.
If you’ve run into any other issues, please contact us.