Έργα Raspberry Pi: Σύγχρονες λύσεις απαιτούν πιο σύγχρονες λύσεις!
Αυτή την εβδομάδα, σας παρουσιάζουμε μερικά πολύ σύγχρονο Έργα Raspberry Pi!
Έχετε δει ποτέ το meme που λέει "Τα σύγχρονα προβλήματα απαιτούν σύγχρονες λύσεις";
Λοιπόν, τι συμβαίνει αν οι σύγχρονες λύσεις σας δημιουργούν κάποια σύγχρονα προβλήματα;
Τότε, χρειάζεστε μια σύγχρονη λύση.
Ως εκ τούτου, οι σύγχρονες λύσεις απαιτούν σύγχρονες λύσεις.
Μερικές φορές, όμως, αυτά τα προβλήματα είναι τόσο μικρά που οι κατασκευαστές δεν μπαίνουν στον κόπο να δημιουργήσουν μια λύση για εσάς.
Ευτυχώς, ως λάτρεις του Raspberry Pi, η εφευρετικότητά μας είναι ατελείωτη.

Απενεργοποίηση της αυτόματης διακοπής της εκκίνησης του κινητήρα
Τα χιλιόμετρα βενζίνης είναι πολύ σημαντικά αυτές τις μέρες με τις τιμές της βενζίνης να ξεφεύγουν από τα διαγράμματα.
Προς τιμήν τους, οι κατασκευαστές αυτοκινήτων δημιούργησαν μια λύση που σταματά τον κινητήρα όταν ανιχνεύει ότι το αυτοκίνητο βρίσκεται στο ρελαντί. Αυτό βοηθά πραγματικά το αυτοκίνητό σας να εξοικονομεί βενζίνη όταν είναι σταματημένο.
Αλλά κάποιοι προτιμούν να μην το φοράνε και μπορώ να καταλάβω γιατί.
Πριν από λίγο καιρό ήμουν σε ένα σύγχρονο ενοικιαζόμενο αυτοκίνητο. Διαπίστωσα ότι με ενεργοποιημένο το σύστημα αυτόματης διακοπής της εκκίνησης, έπρεπε να "προγραμματίσω" την πίεση των φρένων μου ώστε να μπορέσω να βάλω μπροστά τον κινητήρα πριν το φανάρι γίνει πράσινο.
Μερικές φορές το ξεχνούσα και μετά καθόμουν στο πράσινο για περισσότερο χρόνο από όσο θα ήθελα. Το αντιστάθμιζα πατώντας πιο δυνατά το γκάζι. Δεν συνιστάται.
Ορισμένοι κατασκευαστές αυτοκινήτων δεν σας δίνουν τη δυνατότητα επιλογής για την απενεργοποίηση της λειτουργίας αυτόματης διακοπής της εκκίνησης. Αν θέλετε να την απενεργοποιήσετε, πρέπει να πατάτε το κουμπί κάθε φορά που οδηγείτε.
Όχι πια!
Περίγραμμα του έργου
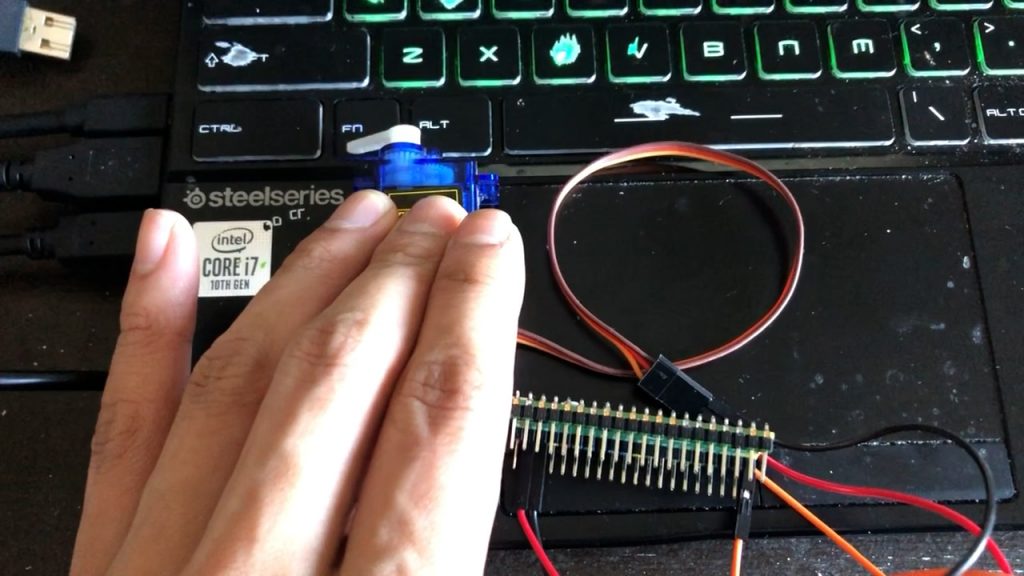
Αυτό που βλέπετε στο παραπάνω βίντεο είναι ένα εμπορικό προϊόν, αλλά μπορεί να επιτευχθεί εύκολα με ένα Raspberry Pi Pico και ένα σερβομηχανισμό SG90. Η τροφοδοσία του Raspberry Pi Pico μπορεί να γίνει από τις θύρες USB του αυτοκινήτου.
Ο βασικός κώδικας MicroPython είναι ο εξής και υποθέτει ότι έχετε συνδέσει τη γραμμή σήματος του σερβομηχανισμού στο GPIO 16.
from time import sleep
from machine import Pin
from machine import PWM
pwm = PWM(Pin(16))
pwm.freq(50)
pwm.duty_ns(2000000)
sleep(0.5)
pwm.duty_ns(500000)
Υπάρχουν μερικές προκλήσεις σε αυτό:
Πρώτον, πρέπει να ρυθμίσετε τη γωνία του σερβομηχανισμού. Αυτή ρυθμίζεται από την τιμή που περνάει στο pwn_duty_ns, η οποία είναι σε νανοδευτερόλεπτα.
2 εκατομμύρια νανοδευτερόλεπτα (2.000.000) αντιστοιχούν σε μια πλήρη περιστροφή και 500.000 σε μια πλήρη περιστροφή προς την αντίθετη κατεύθυνση.
Τελικά, χρησιμοποίησα μόνο 1.000.000 έως 2.000.000 νανοδευτερόλεπτα και όχι όλο το εύρος του σερβομηχανισμού.
Δεύτερον, πρέπει να γνωρίζετε πώς να απενεργοποιήσετε τη λειτουργία start-stop του αυτοκινήτου σας. Ορισμένες απαιτούν να πατήσετε και να κρατήσετε πατημένο και έτσι θα πρέπει να βάλετε να ρυθμίσετε το ύπνος μήκος.
Τρίτον, θέλετε αυτό να λειτουργεί μόνο όταν ο κινητήρας είναι αναμμένος και όχι όταν ξεκινάτε το ραδιόφωνο. Αυτό είναι ίσως η μεγαλύτερη πρόκληση, επειδή δεν υπάρχει εύκολος τρόπος να πείτε στο Pico πότε είναι αναμμένος ο κινητήρας.
Αλλά το ίδιο έργο - η λειτουργία ενός σερβομηχανισμού με το Raspberry Pi Pico μπορεί στην πραγματικότητα να είναι πολύ επωφελής για πολλά άλλα έργα, όπως ένα διακόπτη εναλλαγής. Χρησιμοποιώ αυτήν ακριβώς τη μέθοδο για να μείνετε στο κρεβάτι και σβήστε τα φώτα της κρεβατοκάμαρας.
Ή μπορεί να χρησιμοποιηθεί για τη διακοπή μιας προφύλαξης οθόνης με το πάτημα ενός τυχαίου κουμπιού (όπως το INSERT).
OpenMower: GPS ρομποτική χλοοκοπτική μηχανή
"Τα ρομποτικά χλοοκοπτικά είναι χάλια!"
Αυτό λέει ο Clemens Elflein, ο δημιουργός του OpenMower.
Η γκρίνια του είναι ότι αυτά τα ρομποτικά μηχανήματα είναι πολύ χαζά.
"Βασικά, όλα αυτά τα ρομπότ κινούνται προς μια τυχαία κατεύθυνση μέχρι να φτάσουν στα όρια του γκαζόν, περιστρέφονται για μια τυχαία διάρκεια και επαναλαμβάνονται. Νομίζω ότι μπορούμε να κάνουμε κάτι καλύτερο!"
Έτσι, αντί για μια τυχαία μέθοδο κουρέματος του γκαζόν, ο Clemens αναζήτησε κάτι πιο ακριβές ενσωματώνοντας το GPS. Το πλεονέκτημα εδώ είναι ότι το ρομποτικό μηχάνημα μπορεί επίσης να πλοηγηθεί αυτόνομα στην πίσω αυλή και να κουρέψει το γρασίδι εκεί!
Το ρομποτικό χλοοκοπτικό είναι μια σύγχρονη λύση για τη μείωση της επαναλαμβανόμενης εργασίας του κουρέματος του γκαζόν. Αλλά δεν είναι αρκετά καλό.
Θυμηθείτε γιατί το διαβάζετε αυτό... οι σύγχρονες λύσεις απαιτούν πιο σύγχρονες λύσεις!
Στόχοι του έργου
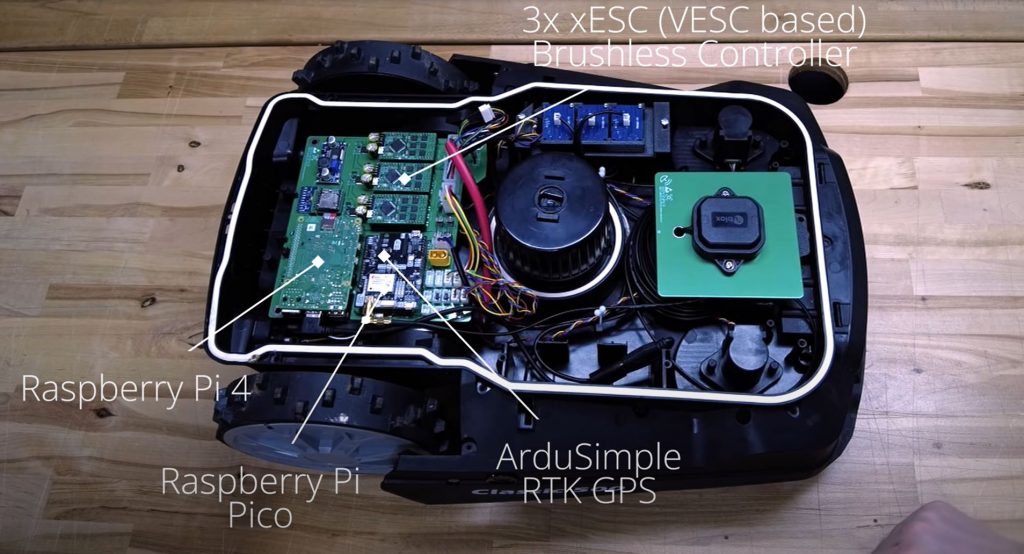
Ο Clemens χρησιμοποίησε ένα εμπορικό προϊόν που ονομάζεται YardForce Classic 500 και εγκατέστησε ένα Raspberry Pi 4 και ένα Raspberry Pi Pico.
Όπως δήλωσε στο Github, αυτοί είναι οι στόχοι του:
Αυτόνομο κούρεμα γκαζόν: Προφανώς, η συσκευή θα πρέπει να μπορεί να κουρεύει το γκαζόν αυτόματα.
- Καλή ασφάλεια: π.χ. διακοπή έκτακτης ανάγκης σε περίπτωση ανύψωσης ή συντριβής.
- Δεν απαιτείται περιμετρικό καλώδιο: Θέλουμε να είμαστε ευέλικτοι και να υποστηρίζουμε πολλαπλές περιοχές κοπής.
- Χαμηλό κόστος: Θα πρέπει να είναι φθηνότερο από ένα προϊόν μεσαίας κατηγορίας από το ράφι.
- Open: Θέλω να μοιραστώ τη γνώση και να δώσω τη δυνατότητα και σε άλλους να κατασκευάσουν ένα OpenMower.
- Ωραίο να το βλέπεις: Δεν πρέπει να ντρέπεστε να έχετε ένα OpenMower να κουρεύει το γκαζόν σας.
- Αποφύγετε τα εμπόδια: Το χλοοκοπτικό πρέπει να εντοπίζει τα εμπόδια και να τα αποφεύγει κατά τη διάρκεια του κουρέματος.
- Ανίχνευση βροχής: Η συσκευή θα πρέπει να μπορεί να ανιχνεύει τις κακές καιρικές συνθήκες και να διακόπτει το κούρεμα μέχρι να βελτιωθούν.
Μπορείς να το κάνεις;
Ο Κλέμενς δημιούργησε μια ομάδα Discord και οι άνθρωποι συμμετέχουν καθημερινά.
Δεν σας συνιστά να το κάνετε αν δεν ξέρετε τι κάνετε.
Το κάνει πραγματικά προφανές με μια δήλωση αποποίησης ευθύνης ότι αν κάτι πάει στραβά, μην έρθεις να χτυπήσεις την πόρτα του.
Εγγραφείτε στο OpenMower Discord ή δείτε το GitHub.
Όχι κακά, Σέρλοκ: υπερβολική μηχανική για το πώς να απαλλαγείτε από τα κακά του σκύλου στην αυλή
Ο Caleb Olson έχει ένα corgi που αφήνει περιττώματα σε όλη την αυλή του.
Αρχικά, σχεδίασε ένα σύστημα που επισημαίνει τα σημεία όπου ο σκύλος του, ο Twinkie, ρίχνει κακά και τα σημειώνει σε μια εικόνα. Μια σύγχρονη λύση.
Όμως η σύγχρονη λύση αποδείχθηκε "πάρα πολύ δουλειά", καθώς πρέπει να ανατρέχει στο τηλέφωνό του για να πάρει μια ιδέα για το πού βρίσκονται οι τοποθεσίες.
Τι έκανε λοιπόν; Εγκατέστησε έναν ρομποτικό βραχίονα με λέιζερ που δείχνει πού βρίσκονται τα κακά.
Οι σύγχρονες λύσεις απαιτούν πιο σύγχρονες λύσεις.
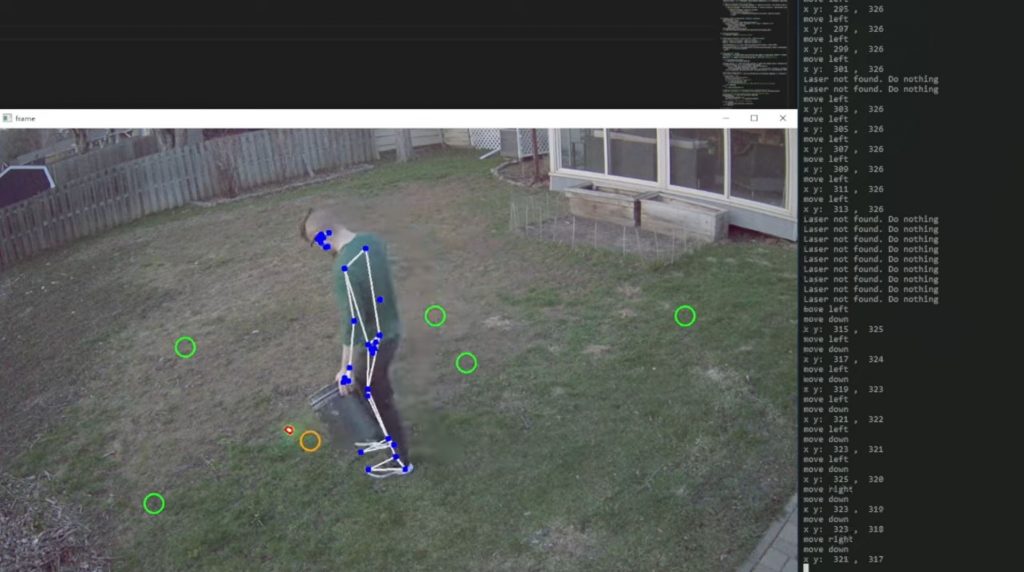

Η όραση του υπολογιστή είναι ζωτικής σημασίας για το έργο αυτό, καθώς ξεκινά την καθοδήγηση του λέιζερ για τα κακά. Σταυρώνοντας τα χέρια του, ο υπολογιστής ξεκινά το σύστημα καθοδήγησης δείχνοντας το πρώτο σημείο κακά.
Στη συνέχεια, καθώς σκύβει για να το μαζέψει, το OpenCV το ανιχνεύει και τον μετακινεί στο επόμενο σημείο που θα κάνει κακά.
Έχετε κάποιο από αυτά τα... σχέδια;
Χτενίζω καθημερινά το Reddit, το Twitter και άλλους ιστότοπους για να βρω ενδιαφέροντα έργα για να τα παρουσιάσω στο ενημερωτικό δελτίο PiCockpit.
Μπορείτε επίσης να ελέγξετε τη σειρά Paragon Projects εδώ.
Αν γνωρίζετε κάποιο ενδιαφέρον έργο, αφήστε ένα σχόλιο παρακάτω 👇
Αν σας άρεσε αυτή η σειρά, εγγραφείτε στο newsletter μας παρακάτω 👇