Υποβρύχιο Lego & κάμερα: Pi: Raspberry Pi Projects
Έχουμε μερικά ενδιαφέροντα έργα Raspberry Pi αυτή την εβδομάδα.
Το πρώτο έργο είναι ένα τηλεκατευθυνόμενο υποβρύχιο που μπορεί να βυθίζεται, να αναδύεται, να στρίβει και να κινείται. Στην καρδιά του υποβρυχίου βρίσκεται ένα Raspberry Pi Zero 2.
Το δεύτερο έργο είναι μια φωτογραφική μηχανή "Pieca", που πήρε το όνομά της από μια φωτογραφική μηχανή της Leica. Η βασική ομοιότητα μεταξύ της Pieca και μιας Leica είναι η χρήση ενός εναλλάξιμου φακού M-mount, ο οποίος στη συνέχεια συνδυάζεται με το Raspberry Pi 4 και τη μονάδα αισθητήρα εικόνας υψηλής ποιότητας.
Raspberry Pi Zero + Υποβρύχιο Lego Technic
Η τέταρτη φορά είναι η γοητεία για τον Κανάλι πειράματος με τούβλα (BEC), ο οποίος δημιούργησε αυτό το έργο χρησιμοποιώντας εξαρτήματα Lego Technic και ένα Raspberry Pi Zero 2.
Η μεγαλύτερη πρόκληση που αντιμετώπισε ο BEC είναι να κρατήσει τα υποβρύχια στο βάθος που ήθελε, αλλά για το τέταρτο έργο αποφάσισε να χρησιμοποιήσει μια σύριγγα. Τα προηγούμενα τρία απέτυχαν επειδή,
"Το ασταθές βάθος ήταν ενοχλητικό για τα τρία υποβρύχια που έφτιαξα νωρίτερα, ειδικά για τα υποβρύχια 1 και 3. Αυτά τα υποβρύχια ήταν πάντα είτε στον βυθό είτε στην επιφάνεια. Μια καλή πρόκληση για να ξεπεραστεί".
Πώς η BEC ενσωματώνει το Raspberry Pi στο υποβρύχιο
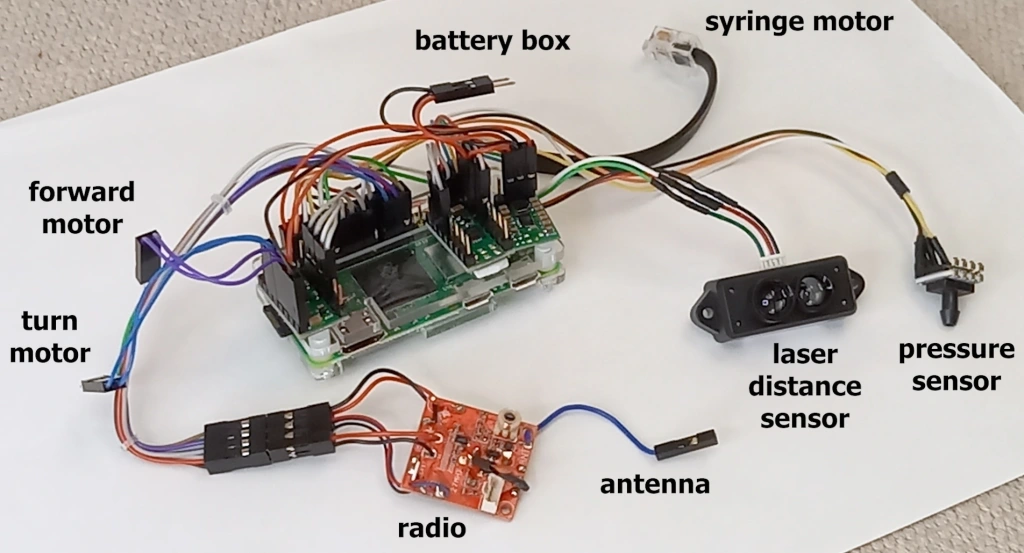
Ο κύριος σκοπός του Raspberry Pi Zero 2 της BEC είναι να ελέγχει το βάθος του υποβρυχίου.
Ο BEC ήθελε αρχικά να χρησιμοποιήσει ένα Raspberry Pi Pico, αλλά η περιορισμένη μνήμη flash του Pico των 2MB ήταν πολύ μικρή για τις ανάγκες καταγραφής δεδομένων.
Συλλογή δεδομένων πίεσης με αισθητήρα πίεσης

Η BEC χρησιμοποίησε έναν αισθητήρα απόλυτης πίεσης στο υποβρύχιο.
Η BEC χρησιμοποίησε αρχικά έναν αισθητήρα σχετικής πίεσης, αλλά τα δεδομένα δεν ήταν αξιόπιστα και έτσι αντικατέστησε έναν αισθητήρα απόλυτης πίεσης Honeywell SSCMANV030PA2A3.
Ο αισθητήρας πίεσης δείχνει πόσο βαθιά βρίσκεται το υποβρύχιο.
Εναλλακτικός τρόπος μέτρησης του βάθους: αισθητήρας απόστασης λέιζερ

Η BEC ενσωμάτωσε έναν αισθητήρα απόστασης λέιζερ Sparkfun TFMini-S Micro σε μια προσπάθεια να βρει έναν άλλο τρόπο μέτρησης του βάθους με τη μέτρηση της απόστασης από τον πυθμένα.
Δυστυχώς, οι μετρήσεις βάθους με λέιζερ δεν είναι πολύ αξιόπιστες σε λασπώδη νερά. Η BEC δήλωσε ότι "τα δεδομένα είναι πολύ αποσπασματικά και δεν μπορούν να χρησιμοποιηθούν για έλεγχο", οπότε η BEC δεν χρησιμοποίησε πολύ τον αισθητήρα απόστασης λέιζερ.
Πώς καθορίζεται το βάθος

Τα δεδομένα από τους αισθητήρες βάθους χρησιμοποιούνται στη συνέχεια για την οδήγηση της σύριγγας.
Η σύριγγα είναι συνδεδεμένη με ένα μοτέρ Lego Technic το οποίο αποθηκεύει το πόσο πολύ έχει εισχωρήσει ή αποσυρθεί η σύριγγα.
Με δεδομένα από τον αισθητήρα πίεσης ή/και τον αισθητήρα απόστασης λέιζερ, η BEC έγραψε ένα πρόγραμμα που υπολογίζει τη θέση της σύριγγας, λαμβάνει δεδομένα βάθους, υπολογίζει την έξοδο ελέγχου PID και στη συνέχεια οδηγεί τον κινητήρα της σύριγγας στο βάθος-στόχο.
Και κάπως έτσι ο BEC κατασκεύασε το υποβρύχιο Raspberry Pi + Lego. Μπορείτε να διαβάσετε την ανάρτηση στο blog που αποτελείται από 10 μέρη εδώ.
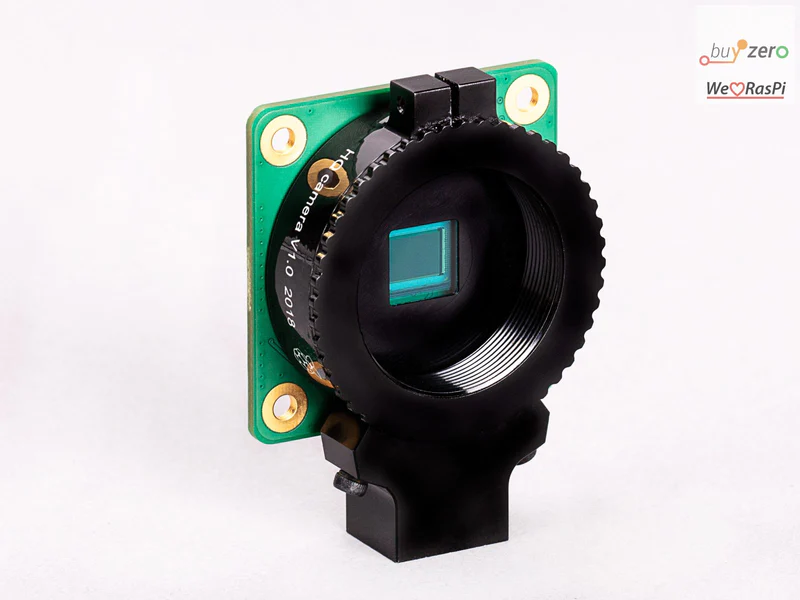
Pieca Camera

Ο Tom Schucker κατασκεύασε το Pieca χρησιμοποιώντας ένα Raspberry Pi 4, την κάμερα Raspberry Pi High Quality Camera, μια οθόνη 5″ που συνδέεται μέσω της θύρας DSI και μια τρισδιάστατα εκτυπωμένη θήκη. Το όλο σύστημα τροφοδοτείται από το σύστημα μπαταριών PiSugar.
Είναι το ιδανικό έργο Raspberry Pi για να τραβήξετε τώρα φωτογραφίες του νέου σας γαμάτου υποβρυχίου Lego!
Η φωτογραφική μηχανή διαθέτει επίσης άλλα συναρπαστικά χαρακτηριστικά, όπως μονάδα GPS, μετρητή διάρκειας ζωής της μπαταρίας και μονάδα USB για εύκολη μεταφορά αρχείων.

Χρήση οποιουδήποτε φακού rangefinder M-mount
Το καλύτερο μέρος σε αυτό το έργο είναι η δυνατότητα χρήσης οποιουδήποτε φακού M39 rangefinder.
Κατά τη διάρκεια του περασμένου αιώνα παρήχθησαν πολλοί από αυτούς τους φακούς. Μπορείτε να αγοράσετε φακούς ρωσικής κατασκευής πολύ φτηνά και μπορείτε επίσης να αγοράσετε φακούς γερμανικής κατασκευής.
Αυτοί οι φακοί δημιουργήθηκαν σε μια εποχή χειροκίνητων φωτογραφικών μηχανών χωρίς αυτόματη εστίαση ή αυτόματο διάφραγμα. Έτσι, θα έπρεπε να ρυθμίζετε το διάφραγμα και να εστιάζετε στον φακό, όπως ακριβώς θα κάνατε με ένα παλιό rangefinder.
Όλες οι εικόνες είναι μεγεθυμένες
Η χρήση ενός φακού που προορίζεται για φορμά 35mm σε μικρότερο αισθητήρα θα σήμαινε ότι όλες οι εικόνες είναι εγγενώς μεγεθυμένες.
Σκεφτείτε το ως εξής: οι φακοί προορίζονται να προβάλλουν μια εικόνα 35mm x 24mm. Ωστόσο, ο αισθητήρας μπορεί να καταγράφει μόνο 6mm x 4,5mm από αυτή την εικόνα 35mm x 24mm. Αυτό σημαίνει ότι όλες οι εικόνες είναι περικομμένες (και ως εκ τούτου φαίνονται σαν να είναι μεγεθυμένες).
Ο Tom αντιστάθμισε με τη χρήση ενός μειωτήρα εστίασης που μειώνει στο μισό την εστιακή απόσταση των φακών.
Βίντεο
Ενδιαφέρεστε για περισσότερα έργα Raspberry Pi;
Μπορείτε να δείτε τη σειρά έργων Paragon Projects εδώ.
Τι θα κάνατε με ένα υποβρύχιο lego και μια κάμερα pieca;