Proyectos Raspberry Pi: Las soluciones modernas requieren soluciones más modernas.
Esta semana, le traemos algunos productos muy moderno Proyectos Raspberry Pi
¿Has visto alguna vez el meme que dice "Los problemas modernos requieren soluciones modernas"?
¿Qué pasa si tus soluciones modernas crean problemas modernos?
Entonces necesita una solución moderna.
Por tanto, las soluciones modernas requieren soluciones modernas.
A veces, sin embargo, estos problemas son tan menores que los fabricantes no se molestan en crear una solución para usted.
Por suerte, como entusiastas de Raspberry Pi, nuestro ingenio es infinito.

Desactivar la parada automática del motor
El consumo de gasolina es muy importante hoy en día, cuando los precios de la gasolina están por las nubes.
En su haber, los fabricantes de automóviles han creado una solución que detiene el motor cuando detecta que el coche está al ralentí. Esto realmente ayuda a tu coche a ahorrar gasolina cuando está parado.
Pero hay gente que prefiere no llevarla y entiendo por qué.
Hace un tiempo estuve en un coche de alquiler moderno. Me di cuenta de que, con el sistema de parada y arranque automático activado, tenía que "planificar" mi presión de frenado para poder arrancar el motor antes de que el semáforo se pusiera en verde.
A veces me olvidaba y me quedaba en verde más tiempo del que me gustaría. Lo compensaba pisando más fuerte el acelerador. No es recomendable.
Algunos fabricantes de automóviles no te dan la opción de desactivar la función de parada y arranque automáticos. Si quieres desactivarla, tienes que pulsar el botón cada vez que conduzcas.
¡Ya no!
Esquema del proyecto
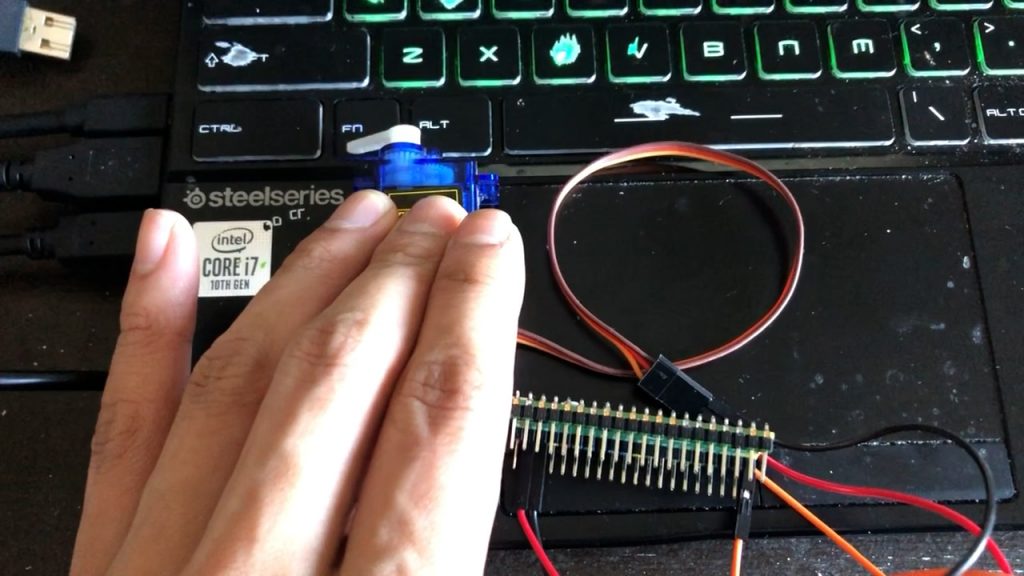
Lo que estás viendo en el vídeo de arriba es un producto comercial, pero se puede lograr fácilmente con una Raspberry Pi Pico y un servo SG90. La alimentación de la Raspberry Pi Pico puede provenir de los puertos USB del coche.
El código básico de MicroPython es este y asume que has conectado la línea de señal del servo al GPIO 16.
from time import sleep
from machine import Pin
from machine import PWM
pwm = PWM(Pin(16))
pwm.freq(50)
pwm.duty_ns(2000000)
sleep(0.5)
pwm.duty_ns(500000)
Esto plantea algunos retos:
En primer lugar, es necesario ajustar el ángulo del servo. Esto se ajusta por el valor pasado a pwn_duty_nsen nanosegundos.
2 millones de nanosegundos (2.000.000) equivalen a una rotación completa y 500.000 a una rotación completa en sentido contrario.
Al final, sólo utilicé entre 1.000.000 y 2.000.000 de nanosegundos, en lugar del rango completo del servo.
En segundo lugar, necesitas saber cómo desactivar la función start-stop de tu coche. Algunos requieren que pulses y mantengas pulsado, por lo que tendrás que poner ajustar el dormir longitud.
En tercer lugar, sólo quieres que funcione cuando el motor está encendido, y no cuando enciendes la radio. Este es probablemente el mayor reto porque no hay manera fácil de decirle al Pico cuando el motor está encendido.
Pero el mismo proyecto - el funcionamiento de un servo con la Raspberry Pi Pico en realidad puede ser muy beneficioso para muchos otros proyectos, como un interruptor de palanca. Yo uso este método exacto para quédate en la cama y apaga las luces del dormitorio.
O se puede utilizar para detener un salvapantallas pulsando un botón aleatorio (como INSERTAR).
OpenMower: Robot cortacésped con GPS
"¡Los robots cortacésped apestan!"
Eso es lo que dice Clemens Elflein, creador de OpenMower.
Su queja es que estos robomowers son demasiado tontos.
"Básicamente, todos estos robots conducen en una dirección aleatoria hasta que llegan al borde del césped, giran durante un tiempo aleatorio y repiten. Creo que podemos hacerlo mejor".
Así que, en lugar de un método aleatorio para cortar el césped, Clemens buscó algo más preciso integrando el GPS. La ventaja es que el robot cortacésped también puede desplazarse de forma autónoma hasta el jardín y cortar la hierba allí.
Un robot cortacésped es una solución moderna para reducir la repetitiva tarea de cortar el césped. Pero no es suficiente.
Recuerde por qué está leyendo esto... ¡las soluciones modernas requieren soluciones más modernas!
Objetivos del proyecto
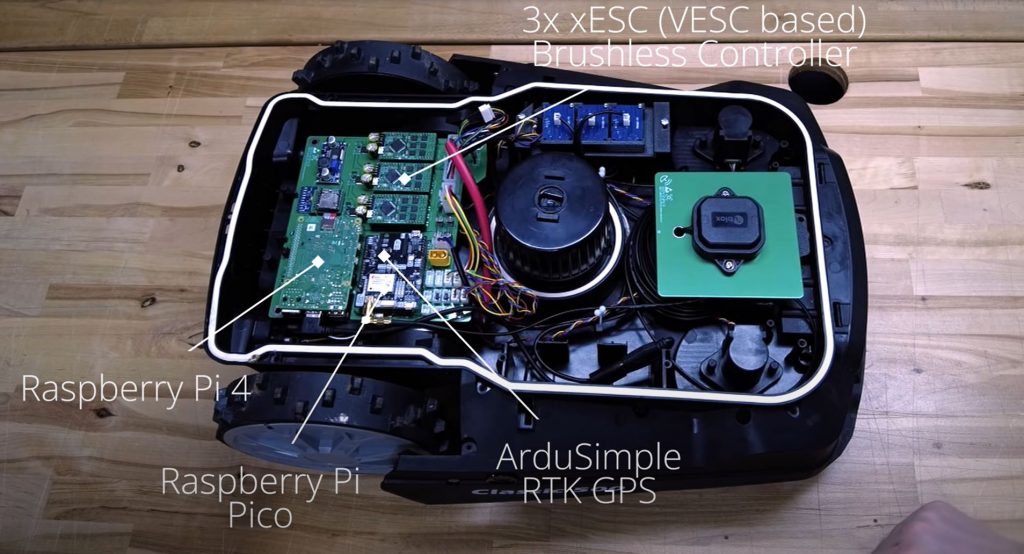
Clemens utilizó un producto comercial llamado YardForce Classic 500 e instaló una Raspberry Pi 4 y una Raspberry Pi Pico.
Como se indica en su GithubEstos son sus objetivos:
Cortar el césped de forma autónoma: Obviamente, el dispositivo debe ser capaz de cortar el césped automáticamente.
- Buena seguridad: El dispositivo debe ser seguro, por ejemplo, parada de emergencia en caso de elevación o choque.
- No necesita cable perimetral: Queremos ser flexibles y soportar múltiples áreas de siega.
- Bajo coste: debe ser más barato que un producto comercial de gama media.
- Abierto: Quiero compartir conocimientos y permitir que otros construyan también un OpenMower.
- Bonito a la vista: No debería avergonzarse de tener un OpenMower cortando su césped.
- Evite los obstáculos: El cortacésped debe detectar los obstáculos y evitarlos durante la siega.
- Detección de lluvia: El dispositivo debe ser capaz de detectar malas condiciones meteorológicas y pausar la siega hasta que mejoren.
¿Puedes hacerlo?
Clemens ha creado un grupo de Discord y la gente participa a diario.
No recomienda hacerlo a menos que se sepa lo que se hace.
Lo deja bien claro con un descargo de responsabilidad: si algo va mal, no vengas a llamar a su puerta.
Únete a OpenMower Discordia o consulte su GitHub.
Sin cacas, Sherlock: sobreingeniería para eliminar las cacas de perro en el jardín
Caleb Olson tiene un corgi que deja excrementos por todo su jardín.
Al principio, diseñó un sistema que señala dónde su perro, Twinkie, hace caca y lo marca en una imagen. Una solución moderna.
Pero la solución moderna resultó ser "demasiado trabajo", ya que tiene que consultar su teléfono para hacerse una idea de dónde están las ubicaciones.
¿Y qué hizo? Instaló un brazo robótico con un láser que señala dónde está la caca.
Las soluciones modernas requieren soluciones más modernas.
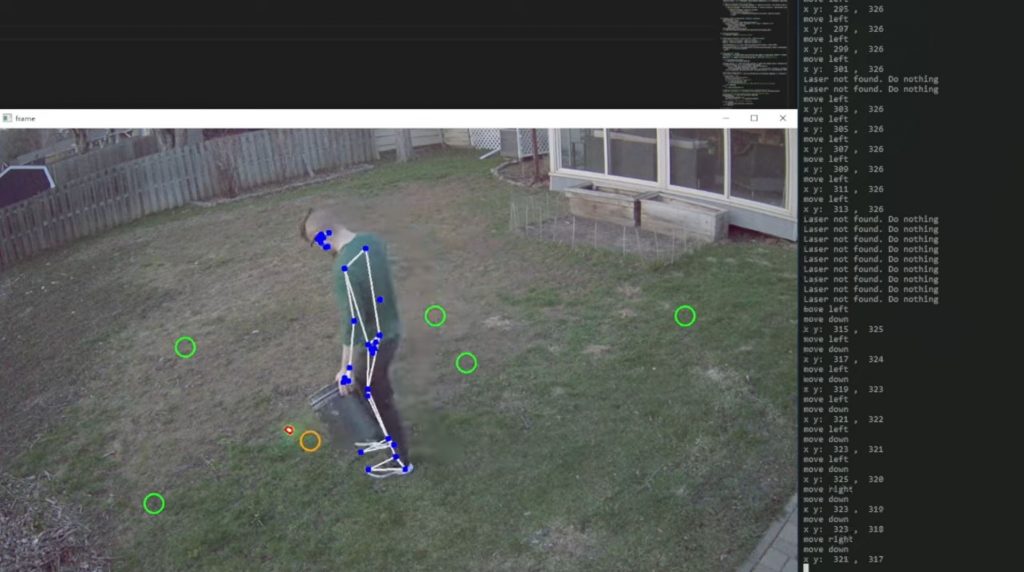

La visión por ordenador es crucial para esta tarea, ya que inicia el guiado láser de la caca. Al cruzar los brazos, el ordenador inicia el sistema de guiado señalando el primer punto de caca.
Entonces, cuando se agacha para recogerlo, OpenCV lo detecta y lo desplaza al siguiente punto de caca.
¿Tenéis alguno de esos... proyectos?
Todos los días peino Reddit, Twitter y otros sitios web para encontrar proyectos interesantes que publicar en el boletín PiCockpit.
También puede consultar nuestra serie Paragon Projects aquí.
Si conoces algún proyecto interesante, deja un comentario a continuación 👇
Si te gusta esta serie, suscríbete a nuestro boletín a continuación 👇