Proyecto Paragon: ¡ESP32 Drones!

La semana pasada publicamos un artículo sobre los 10 mejores proyectos ESP32 de 2023. Bueno, claramente nos precipitamos, porque sólo un día después, Joshua Bird compartió el proyecto ESP32 más genial de 2023: Drones ESP32 que vuelan de forma autónoma con un sistema de captura de movimiento.
Lo mejor de todo es que Joshua ha compartido todos los detalles del proyecto y lo ha hecho de código abierto.

Este proyecto es bastante complicado, pero Joshua lo hace parecer ridículamente sencillo, lo que da fe de un proyecto extremadamente meditado.
Hardware
En cuanto al hardware, hay que tener en cuenta dos cosas. En primer lugar, el sistema de captura de movimientos. La segunda son los propios drones.
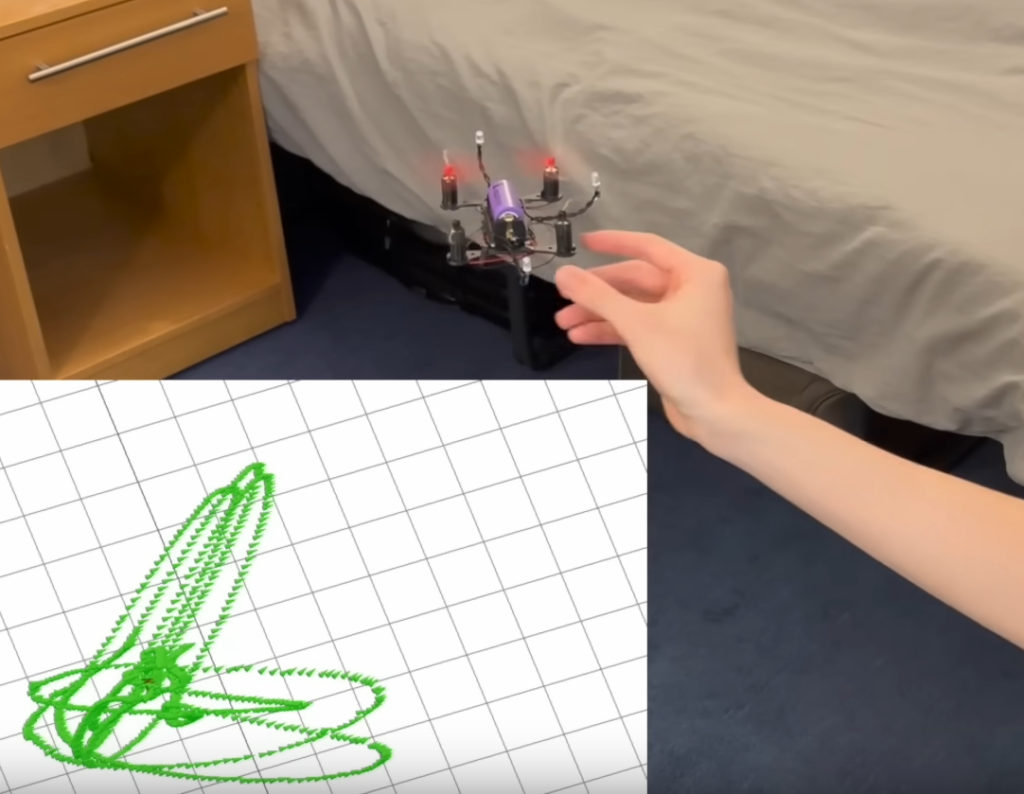
El sistema de captura del movimiento se basa en cuatro cámaras que rastrean marcadores infrarrojos. Así pueden determinar la ubicación de los drones y colocarlos en su sitio.
Lo mejor de todo es que el sistema de captura de movimiento es capaz de localizar varios drones al mismo tiempo. Así que, como dice Joshua, puedes crear un enjambre de drones.
Esta configuración permite a los drones desplazarse de forma autónoma al lugar elegido.
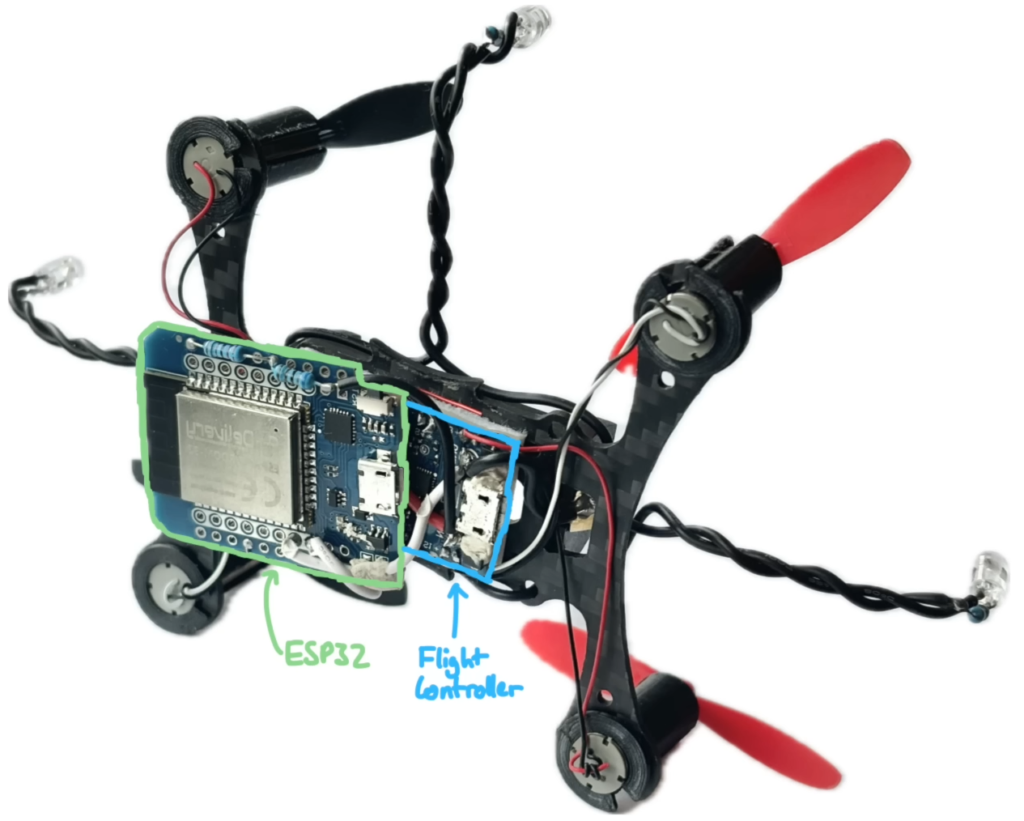
Así que ahora vamos a llegar a los aviones no tripulados, que giran principalmente en torno a un ESP32 y un cepillo F3 EVO Micro placa de control de vuelo.
Si estás interesado en montarlo tú mismo y quieres un desglose completo de las piezas necesarias, ¡estás de suerte! Joshua ha tenido la amabilidad de enumerar los componentes y los precios (con enlaces) en la página web Página de debate de GitHub:
| dispositivo | precio | nombre |
|---|---|---|
| Controlador de vuelo | $23 | Controlador de vuelo F3 EVO Micro Brushed con Betaflight |
| Bastidor Motor y puntales | $13 | Bastidor genérico de dron con escobillas de 95 mm, motores con escobillas 8520, hélices de 55 mm |
| Batería | $5 | YDL 18350 (1100mah, 9A) |
| Portapilas | $0.5 | Soporte de batería 1S 18350 |
| Marcadores IR | $0.1 | Led IR de 3mm (hay que lijar la superficie para que emitan luz uniformemente, en vez de solo hacia arriba) |
| Receptor ESP32 | $4 | WEMOS D1 Mini ESP32 USB-C |
Como puedes ver, ¡podrás montarlo sin arruinarte!
Además, Joshua también ha incluido los archivos .stl en GitHub, si quieres imprimir tú mismo las piezas del dron en 3D. Así podrás poner en marcha tu propio enjambre de drones en un abrir y cerrar de ojos.
Probablemente lo más difícil, si quieres ahorrar dinero, sea configurar las cámaras para el sistema de captura de movimientos. Joshua utilizó PlayStation Eye cámaras. Pero, aunque son baratos, tendrás que sustituir el filtro de corte IR por un filtro IR.
Al fin y al cabo, lo importante es que capten la luz infrarroja.
Y aquí brilla el ingenio puro, ya que Joshua recortó la tira de infrarrojos de un disquete para construir el filtro IR.
Software
Joshua ha escrito el backend en Python. Los scripts de Python se ejecutan con OpenCV, SciPy Optimizer y NumPy para determinar la ubicación de las cámaras y triangular la posición de los drones.
El backend se comunica con las cámaras directamente y también con un ESP32 en la pared, que funciona como emisor-receptor con el ESP32 de cada dron a través del protocolo ESP-NOW.
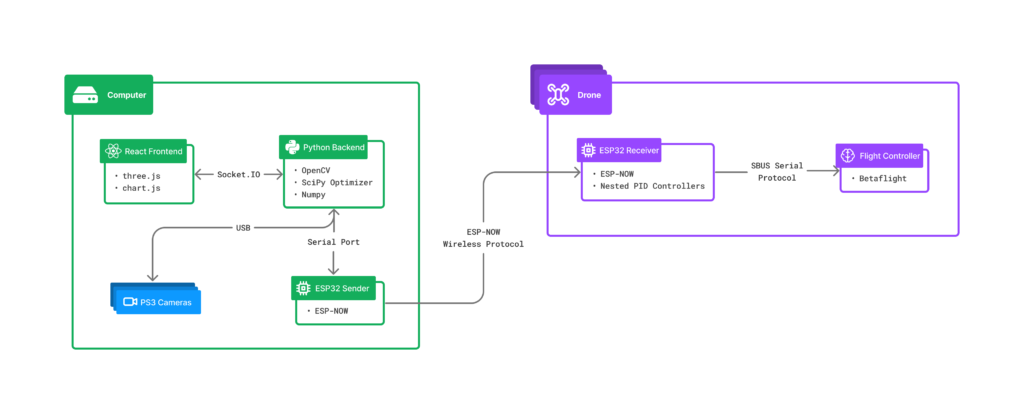
El backend también se comunica con un frontend que Joshua escribió en React para tener una interfaz web sencilla para controlarlo todo.
Conclusión:
La creatividad de este proyecto habla por sí sola. Como alguien escribió a Joshua en RedditSeguiremos tu carrera con el mayor interés". Estoy seguro de que hablo en nombre de todos cuando digo que ¡estoy impaciente por ver lo próximo que comparta Joshua!
No dejes de ver el vídeo, donde Joshua entra en detalles:
También puede visitar la página de GitHub. Incluye todo el código y los archivos .stl, así como información sobre cómo configurarlo tú mismo.
Si quieres ver todos nuestros Proyectos Paragon, ¡puedes hacer clic en el botón de abajo para verlos!
Y si aún no lo has hecho, suscríbete a nuestro boletín. Compartimos muchos de los proyectos interesantes que presentamos en esta serie.
¿Qué harías con tus enjambres de drones ESP32?