Lego Submarino y Cámara: Proyectos Raspberry Pi
Chico, oh, chico tenemos algunos proyectos interesantes Raspberry Pi esta semana.
El primer proyecto es un submarino controlado por radio que puede hundirse, salir a la superficie, girar y moverse. En el corazón del submarino hay una Raspberry Pi Zero 2.
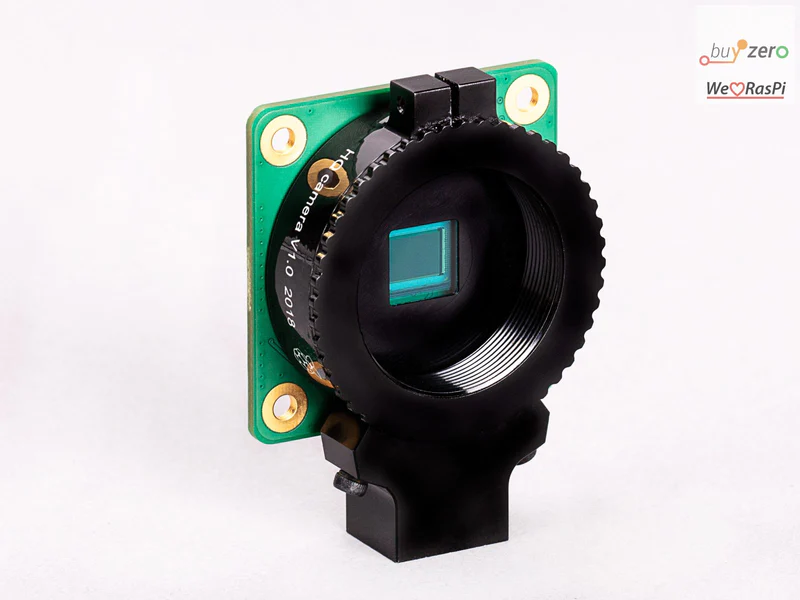
El segundo proyecto es una cámara "Pieca", que toma su nombre de una cámara Leica. La similitud clave entre la Pieca y una Leica es el uso de un objetivo intercambiable de montura M, que luego se acopla a la Raspberry Pi 4 y al módulo del sensor de imagen de alta calidad
Raspberry Pi Zero + submarino Lego Technic
A la cuarta va la vencida para Canal de experimentos con ladrillos (BEC), que creó este proyecto utilizando piezas de Lego Technic y una Raspberry Pi Zero 2.
El mayor reto al que se enfrentó BEC es mantener los submarinos a la profundidad que él quería, pero para el cuarto proyecto decidió utilizar una jeringuilla. Los tres anteriores fracasaron porque
"La profundidad inestable había sido una molestia con los tres submarinos que hice antes, sobre todo con los submarinos 1 y 3. Esos submarinos estaban siempre en el fondo o en la superficie. Esos submarinos siempre estaban en el fondo o en la superficie. Un buen reto que superar".
Cómo BEC integra la Raspberry Pi en el submarino
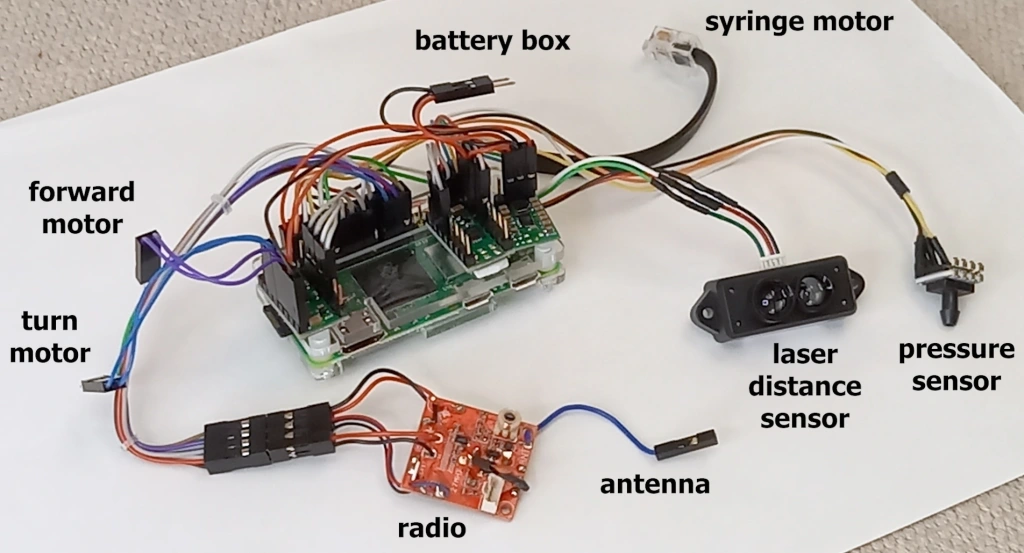
El objetivo principal de la Raspberry Pi Zero 2 de BEC es controlar la profundidad del submarino.
Inicialmente, BEC quería utilizar una Raspberry Pi Pico, pero la limitada memoria flash de 2 MB de la Pico era demasiado pequeña para sus necesidades de registro de datos.
Recogida de datos de presión con un sensor de presión

El BEC utilizó un sensor de presión absoluta en el submarino.
BEC utilizó inicialmente un sensor de presión relativa, pero los datos no eran fiables, por lo que lo cambió por un SSCMANV030PA2A3 de Honeywell, que es un sensor de presión absoluta.
El sensor de presión indica la profundidad a la que se encuentra el submarino.
Método alternativo para medir la profundidad: sensor láser de distancia

BEC integró un sensor láser de distancia Sparkfun TFMini-S Micro en un intento de encontrar otra forma de medir la profundidad midiendo la distancia desde el fondo.
Por desgracia, las mediciones de profundidad con láser no son muy fiables en aguas turbias. Según BEC, "los datos son muy irregulares y no son realmente útiles para el control", por lo que BEC no utilizó mucho el sensor láser de distancia.
Cómo se determina la profundidad

A continuación, los datos de los sensores de profundidad se utilizan para accionar la jeringa.
La jeringuilla está conectada a un motor Lego Technic que almacena el grado de empuje o retracción de la jeringuilla.
Con los datos del sensor de presión y/o el sensor láser de distancia, BEC escribió un programa que calcula la posición de la jeringa, obtiene los datos de profundidad, calcula la salida de control PID y, a continuación, acciona el motor de la jeringa hasta la profundidad objetivo.
Y así es como BEC construyó su submarino Raspberry Pi + Lego. Puede leer la entrada del blog en 10 partes aquí.
Cámara Pieca

Tom Schucker construyó su Pieca utilizando una Raspberry Pi 4, la cámara de alta calidad Raspberry Pi, una pantalla de 5″ que se conecta a través del puerto DSI y una carcasa impresa en 3D. Todo el sistema se alimenta del sistema de baterías PiSugar.
Es el proyecto Raspberry Pi ideal para hacer fotos de tu nuevo submarino de Lego.
La cámara también cuenta con otras funciones interesantes, como un módulo GPS, un indicador de duración de la batería y una unidad USB para facilitar la transferencia de archivos.

Utiliza cualquier objetivo telemétrico con montura M
Lo mejor de este proyecto es la posibilidad de utilizar cualquier objetivo telémetro M39.
Durante el siglo pasado se fabricaron muchas de estas lentes. Puedes comprar lentes de fabricación rusa muy baratas y también alemanas.
Estos objetivos se crearon en una época de cámaras manuales sin autofoco ni diafragma automático. Por tanto, tendrías que ajustar el diafragma y enfocar en el objetivo, igual que harías con un antiguo telémetro.
Todas las imágenes están ampliadas
Utilizar un objetivo pensado para el formato de 35 mm en un sensor más pequeño significaría que todas las imágenes están inherentemente ampliadas.
Piénsalo así: los objetivos están pensados para proyectar una imagen de 35 mm x 24 mm. Sin embargo, puede que el sensor sólo capture 6 mm x 4,5 mm de esa imagen de 35 mm x 24 mm. Eso significa que todas las imágenes están recortadas (y, por tanto, parece que están ampliadas).
Tom lo compensó utilizando un reductor focal que reduce a la mitad la distancia focal de los objetivos.
Vídeo
¿Te interesan más proyectos Raspberry Pi?
Puede consultar nuestra serie Paragon Projects aquí.
¿Qué harías con un submarino de lego y una cámara pieca?