Projets Raspberry Pi : Les solutions modernes nécessitent des solutions plus modernes !
Cette semaine, nous vous présentons des moderne Projets Raspberry Pi !
Vous avez déjà vu le mème qui dit : "Les problèmes modernes appellent des solutions modernes" ?
Que se passe-t-il si vos solutions modernes créent des problèmes modernes ?
Dans ce cas, vous avez besoin d'une solution moderne.
C'est pourquoi les solutions modernes nécessitent des solutions modernes.
Parfois, cependant, ces problèmes sont si mineurs que les fabricants ne se donnent pas la peine de créer une solution pour vous.
Heureusement, en tant que passionnés de Raspberry Pi, notre ingéniosité est sans limite.

Désactiver le démarrage et l'arrêt automatiques du moteur
La consommation d'essence est très importante de nos jours, car les prix de l'essence ne cessent d'augmenter.
À leur décharge, les constructeurs automobiles ont mis au point une solution qui arrête le moteur lorsqu'ils détectent que la voiture tourne au ralenti. Cela permet à votre voiture d'économiser de l'essence lorsqu'elle est à l'arrêt.
Mais certaines personnes préfèrent s'en passer et je comprends pourquoi.
Il y a quelque temps, j'ai pris une voiture de location moderne. J'ai découvert qu'avec le système d'arrêt-démarrage automatique activé, je devais "planifier" ma pression de freinage afin de pouvoir démarrer le moteur avant que le feu ne passe au vert.
Il m'arrivait d'oublier et de rester au vert plus longtemps que je ne l'aurais voulu. Je compensais en appuyant plus fort sur l'accélérateur. Pas très recommandable.
Certains constructeurs automobiles ne vous laissent pas le choix de désactiver la fonction d'arrêt-démarrage automatique. Si vous souhaitez la désactiver, vous devez appuyer sur le bouton à chaque fois que vous conduisez.
Plus maintenant !
Schéma du projet
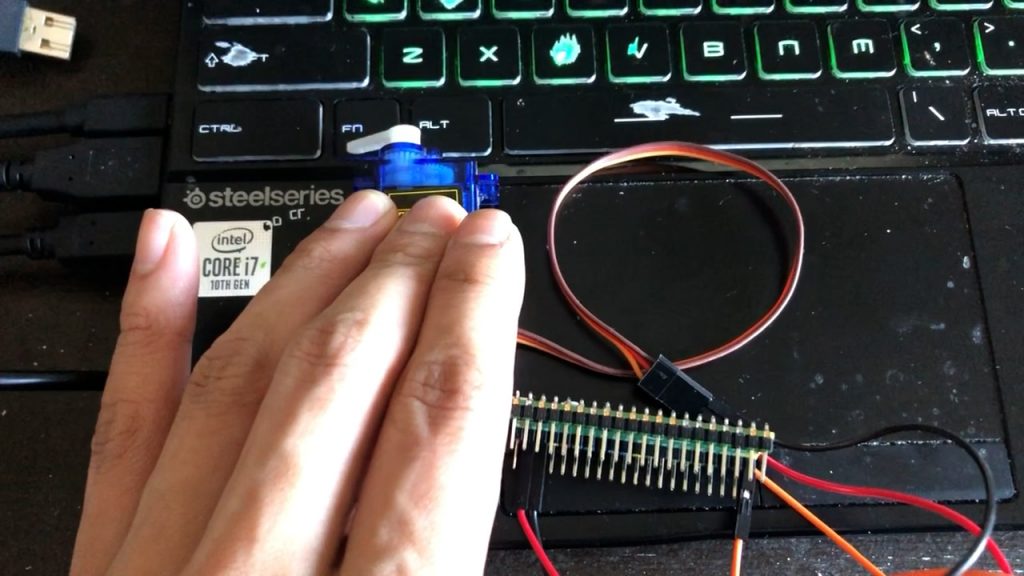
Ce que vous voyez dans la vidéo ci-dessus est un produit commercial, mais il peut être facilement réalisé avec un Raspberry Pi Pico et un servo SG90. Le Raspberry Pi Pico peut être alimenté par les ports USB de la voiture.
Le code MicroPython de base est le suivant et suppose que vous avez branché la ligne de signal du servo dans le GPIO 16.
from time import sleep
from machine import Pin
from machine import PWM
pwm = PWM(Pin(16))
pwm.freq(50)
pwm.duty_ns(2000000)
sleep(0.5)
pwm.duty_ns(500000)
Cela pose quelques problèmes :
Tout d'abord, vous devez ajuster l'angle du servo. Celui-ci est ajusté par la valeur passée dans pwn_duty_nsqui est exprimée en nanosecondes.
2 millions de nanosecondes (2 000 000) correspondent à une rotation complète et 500 000 à une rotation complète dans le sens inverse.
En fin de compte, je n'ai utilisé que 1 000 000 à 2 000 000 de nanosecondes, plutôt que la gamme complète du servo.
Deuxièmement, vous devez savoir comment désactiver la fonction start-stop de votre voiture. Dans certains cas, il faut appuyer sur le bouton et le maintenir enfoncé, ce qui vous oblige à ajuster le bouton d'arrêt d'urgence. dormir longueur.
Troisièmement, vous voulez que cela fonctionne uniquement lorsque le moteur est allumé, et non pas lorsque vous démarrez la radio. C'est probablement le plus grand défi car il n'y a pas de moyen facile d'indiquer au Pico quand le moteur est allumé.
Mais le même projet - faire fonctionner un servo avec le Raspberry Pi Pico - peut en fait être très bénéfique pour de nombreux autres projets, tels qu'un interrupteur à bascule. J'utilise cette méthode pour rester au lit et éteindre les lumières de la chambre.
Il peut également être utilisé pour arrêter un économiseur d'écran en appuyant sur un bouton aléatoire (comme INSERT).
OpenMower : Robot tondeuse GPS
"Les tondeuses robotisées, c'est nul !
C'est ce qu'affirme Clemens Elflein, le créateur d'OpenMower.
Ce qu'il reproche aux robots-tondeuses, c'est d'être trop bêtes.
"En gros, tous ces robots roulent dans une direction aléatoire jusqu'à ce qu'ils atteignent le bord de la pelouse, tournent pendant une durée aléatoire et recommencent. Je pense que nous pouvons faire mieux !"
Ainsi, au lieu d'une méthode de tonte aléatoire, Clemens a cherché quelque chose de plus précis en intégrant le GPS. L'avantage est que la tondeuse robot peut également se rendre de manière autonome dans l'arrière-cour et y tondre l'herbe !
Une tondeuse automatique est une solution moderne pour réduire la tâche répétitive que représente la tonte d'une pelouse. Mais ce n'est pas suffisant.
N'oubliez pas la raison pour laquelle vous lisez ceci... les solutions modernes nécessitent des solutions plus modernes !
Objectifs du projet
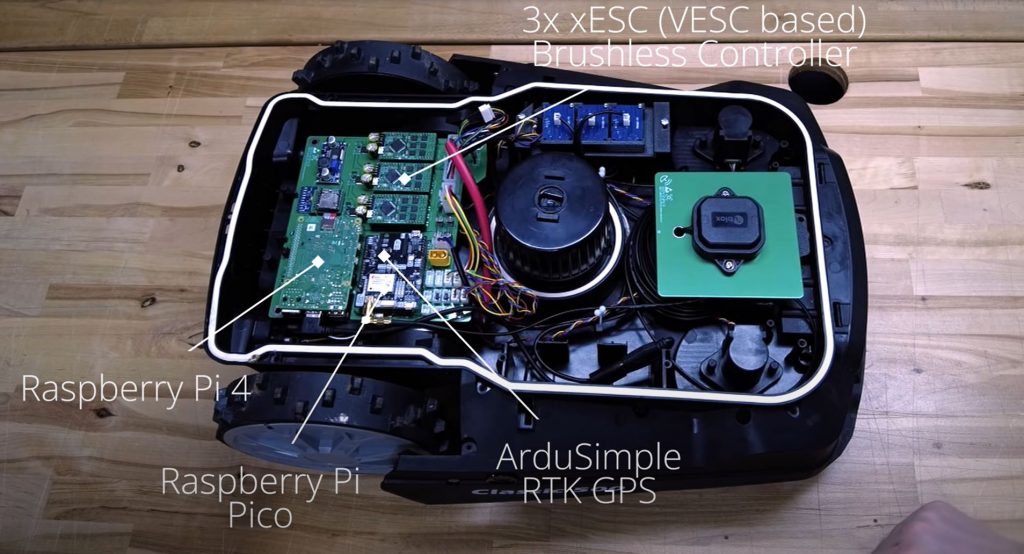
Clemens a utilisé un produit commercial appelé YardForce Classic 500 et a installé un Raspberry Pi 4 et un Raspberry Pi Pico.
Comme indiqué sur son GithubCe sont ses objectifs :
Tonte autonome de la pelouse : Il est évident que l'appareil doit être capable de tondre la pelouse automatiquement.
- Bonne sécurité : L'appareil doit être sûr, par exemple, arrêt d'urgence en cas de soulèvement ou d'écrasement.
- Aucun câble périphérique n'est nécessaire : Nous voulons être flexibles et prendre en charge plusieurs zones de tonte.
- Faible coût : le produit doit être moins cher qu'un produit de milieu de gamme disponible sur le marché.
- Open : Je veux partager mes connaissances et permettre à d'autres de construire une OpenMower.
- Agréable à regarder : Vous ne devriez pas avoir honte d'avoir une OpenMower qui tond votre pelouse.
- Éviter les obstacles : La tondeuse doit détecter les obstacles et les éviter pendant la tonte.
- Détection de la pluie : L'appareil doit être capable de détecter les mauvaises conditions météorologiques et d'interrompre la tonte jusqu'à ce qu'elles s'améliorent.
Pouvez-vous le faire ?
Clemens a créé un groupe Discord et des personnes y participent quotidiennement.
Il ne vous recommande pas de le faire si vous ne savez pas ce que vous faites.
Il précise que si quelque chose ne va pas, il ne faut pas venir frapper à sa porte.
Rejoignez OpenMower Discord ou voir leur GitHub.
Pas de crottes, Sherlock : comment se débarrasser des crottes de chien dans la cour ?
Caleb Olson a un corgi qui laisse des excréments partout dans son jardin.
Au départ, il a conçu un système qui repère les endroits où son chien, Twinkie, fait ses besoins et les marque sur une image. Une solution moderne.
Mais la solution moderne s'est avérée "beaucoup trop laborieuse", car il doit consulter son téléphone pour se faire une idée de l'endroit où il se trouve.
Qu'a-t-il fait ? Il a installé un bras robotisé doté d'un laser qui indique où se trouve le caca.
Les solutions modernes nécessitent des solutions plus modernes.
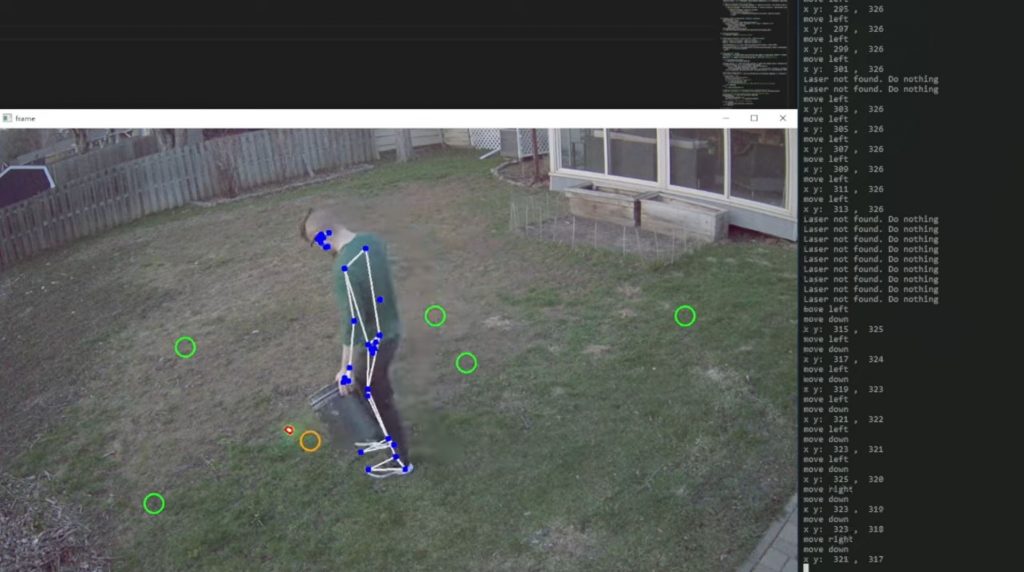

La vision par ordinateur est cruciale pour cette tâche, car c'est elle qui déclenche le guidage laser de la crotte. En croisant les bras, l'ordinateur lance le système de guidage en pointant le premier point de caca.
Puis, lorsqu'il se penche pour le ramasser, OpenCV le détecte et le déplace vers le prochain endroit où il fait ses besoins.
Vous avez tous un de ces... projets ?
Je consulte quotidiennement Reddit, Twitter et d'autres sites Web pour trouver des projets intéressants à présenter dans la lettre d'information PiCockpit.
Vous pouvez également consulter notre série de projets Paragon ici.
Si vous connaissez un projet intéressant, laissez un commentaire ci-dessous 👇
Si vous aimez cette série, inscrivez-vous à notre newsletter ci-dessous 👇