Sottomarino e telecamera Lego: Progetti Raspberry Pi
Questa settimana abbiamo alcuni interessanti progetti Raspberry Pi.
Il primo progetto è un sottomarino radiocomandato che può affondare, emergere, girare e muoversi. Il cuore del sottomarino è costituito da un Raspberry Pi Zero 2.
Il secondo progetto è una fotocamera "Pieca", che prende il nome da una fotocamera Leica. La somiglianza principale tra la Pieca e una Leica è l'uso di un obiettivo intercambiabile M-Mount, che viene poi accoppiato al Raspberry Pi 4 e al modulo del sensore di immagine ad alta qualità.
Raspberry Pi Zero + sottomarino Lego Technic
La quarta volta è quella buona per Canale Esperimento Mattone (BEC), che ha creato questo progetto utilizzando componenti Lego Technic e un Raspberry Pi Zero 2.
La sfida più grande affrontata da BEC è stata quella di mantenere i sottomarini alla profondità desiderata, ma per il quarto progetto ha deciso di utilizzare una siringa. I tre precedenti sono falliti perché,
"La profondità instabile era stata una seccatura per i tre sottomarini che avevo costruito in precedenza, in particolare per i sottomarini 1 e 3. Quei sottomarini erano sempre o sul fondo o in superficie. Una bella sfida da superare".
Come BEC integra il Raspberry Pi nel sottomarino
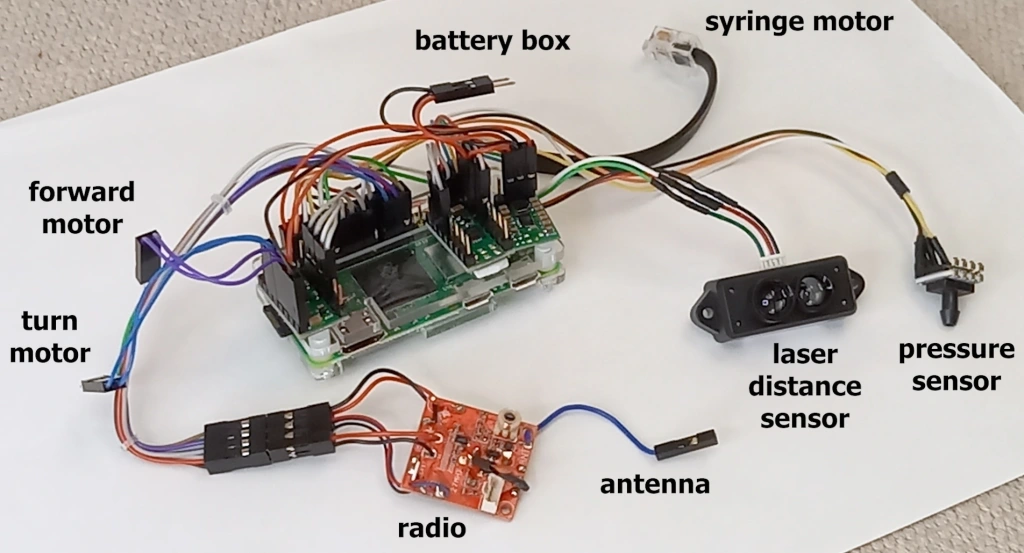
Lo scopo principale del Raspberry Pi Zero 2 di BEC è controllare la profondità del sottomarino.
Inizialmente BEC voleva utilizzare un Raspberry Pi Pico, ma la memoria flash limitata a 2 MB del Pico era troppo poco per le sue esigenze di registrazione dei dati.
Raccolta di dati sulla pressione con un sensore di pressione

BEC ha utilizzato un sensore di pressione assoluta nel sottomarino.
Inizialmente BEC utilizzava un sensore di pressione relativa, ma i dati non erano affidabili e quindi è passato a un Honeywell SSCMANV030PA2A3, che è un sensore di pressione assoluta.
Il sensore di pressione indica la profondità del sottomarino.
Metodo alternativo per misurare la profondità: sensore di distanza laser

BEC ha integrato un sensore di distanza laser Sparkfun TFMini-S Micro nel tentativo di trovare un altro modo per misurare la profondità misurando la distanza dal fondo.
Sfortunatamente, le misurazioni laser della profondità non sono molto affidabili in acque fangose. Secondo BEC, "i dati sono molto frammentari e non sono utilizzabili per il controllo", quindi BEC non ha utilizzato molto il sensore di distanza laser.
Come viene determinata la profondità

I dati dei sensori di profondità vengono quindi utilizzati per pilotare la siringa.
La siringa è collegata a un motore Lego Technic che memorizza il grado di spinta o di ritrazione della siringa.
Con i dati provenienti dal sensore di pressione e/o dal sensore di distanza laser, BEC ha scritto un programma che calcola la posizione della siringa, ottiene i dati sulla profondità, calcola l'uscita di controllo PID, quindi aziona il motore della siringa alla profondità desiderata.
Ed è così che BEC ha costruito il suo sottomarino Raspberry Pi + Lego. Potete leggere il post in 10 parti qui.
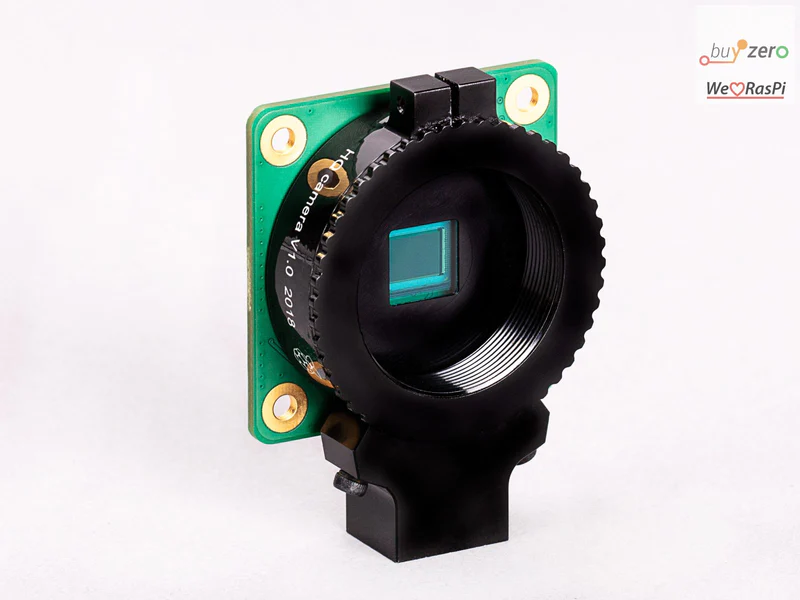
Macchina fotografica Pieca

Tom Schucker ha costruito il suo Pieca utilizzando un Raspberry Pi 4, la Raspberry Pi High Quality Camera, un display da 5″ collegato tramite la porta DSI e un case stampato in 3D. L'intero sistema è alimentato dal sistema di batterie PiSugar.
È il progetto Raspberry Pi ideale per fotografare il vostro nuovo sottomarino Lego!
La fotocamera è dotata anche di altre caratteristiche interessanti, come il modulo GPS, l'indicatore di durata della batteria e l'unità USB per facilitare il trasferimento dei file.

Utilizzare qualsiasi obiettivo a telemetro con attacco M
La parte migliore di questo progetto è la possibilità di utilizzare qualsiasi obiettivo M39 a telemetro.
Nel corso del secolo scorso sono state prodotte molte lenti di questo tipo. È possibile acquistare lenti di produzione russa a prezzi molto bassi, ma anche di produzione tedesca.
Questi obiettivi sono stati creati in un'epoca di fotocamere manuali senza autofocus o apertura automatica. Quindi, bisognava impostare l'apertura e la messa a fuoco sull'obiettivo, proprio come si faceva con una vecchia macchina a telemetro.
Tutte le immagini sono ingrandite
Utilizzare un obiettivo destinato al formato 35 mm su un sensore più piccolo significa che tutte le immagini sono intrinsecamente ingrandite.
Pensate a questo aspetto: gli obiettivi sono destinati a proiettare un'immagine di 35 x 24 mm. Tuttavia, il sensore potrebbe catturare solo 6 mm x 4,5 mm di quell'immagine di 35 mm x 24 mm. Ciò significa che tutte le immagini sono ritagliate (e quindi sembrano ingrandite).
Tom ha compensato utilizzando un riduttore di focale che dimezza la lunghezza focale degli obiettivi.
Video
Siete interessati ad altri progetti Raspberry Pi?
Potete consultare la nostra serie di progetti Paragon qui.
Cosa faresti con un sottomarino lego e una telecamera pieca?