Lego Submarine & Câmara: Projectos Raspberry Pi
Esta semana temos alguns projectos Raspberry Pi interessantes.
O primeiro projecto é um submarino controlado por rádio que pode afundar, emergir, virar e mover-se. No coração do submarino está um Raspberry Pi Zero 2.
O segundo projecto é uma câmara "Pieca", com o nome de uma câmara Leica. A semelhança chave entre a Pieca e uma Leica é a utilização de uma lente M-mount permutável, que é depois emparelhada com a Raspberry Pi 4 e o módulo sensor de imagem de alta qualidade.
Submarino Raspberry Pi Zero + Lego Technic
A quarta vez é o encanto para Canal de Experimentação de Tijolos (BEC), que criou este projecto utilizando peças Lego Technic e um Raspberry Pi Zero 2.
O maior desafio que BEC enfrentou foi manter os submarinos na profundidade que desejava, mas para o quarto projecto, decidiu usar uma seringa. Os três últimos fracassaram porque,
"A profundidade instável tinha sido um incómodo com os três submarinos que fiz anteriormente, especialmente os submarinos 1 e 3. Esses submarinos estavam sempre no fundo ou na superfície. Um bom desafio a superar".
Como o BEC integra o Raspberry Pi no submarino
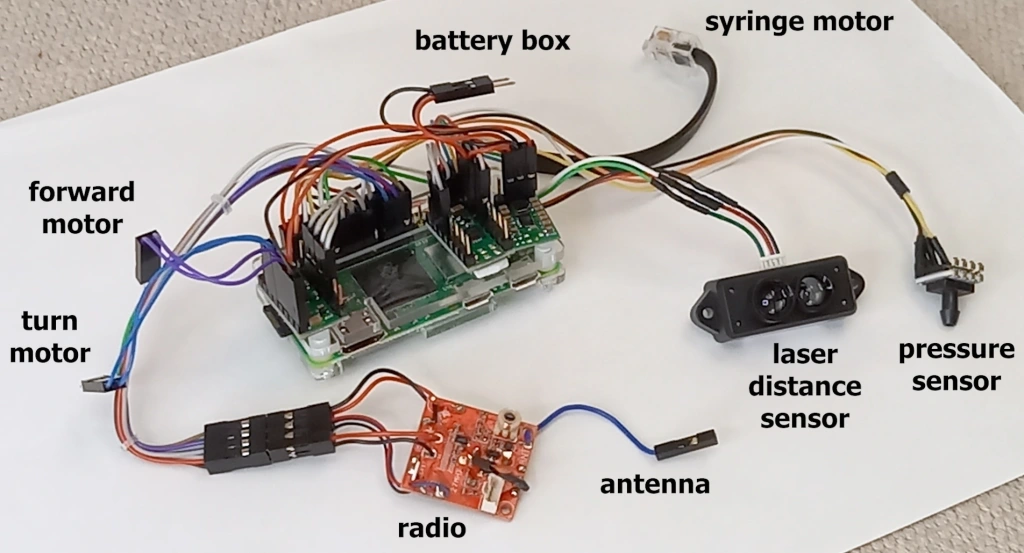
O principal objectivo do Raspberry Pi Zero 2 da BEC é o controlo da profundidade do submarino.
BEC queria inicialmente usar um Raspberry Pi Pico mas a memória flash limitada do Pico de 2MB era demasiado pequena para as suas necessidades de registo de dados.
Recolha de dados de pressão com um sensor de pressão

BEC utilizou um sensor de pressão absoluta no submarino.
BEC utilizou inicialmente um sensor de pressão relativa, mas os dados não eram fiáveis e por isso trocou por um Honeywell SSCMANV030PA2A3, que é um sensor de pressão absoluta.
O sensor de pressão indica a profundidade do submarino.
Forma alternativa de medir a profundidade: sensor de distância laser

BEC integrou um sensor de distância Sparkfun TFMini-S Micro laser numa tentativa de encontrar outra forma de medir a profundidade através da medição da distância do fundo.
Infelizmente, as medições de profundidade do laser não são muito fiáveis em águas lamacentas. BEC disse, "os dados são muito irregulares e não são realmente utilizáveis para controlo", por isso BEC não utilizou muito o sensor de distância do laser.
Como é determinada a profundidade

Os dados dos sensores de profundidade são então utilizados para accionar a seringa.
A seringa está ligada a um motor Lego Technic que armazena o quão longe é empurrada ou retraída a seringa.
Com os dados do sensor de pressão e/ou do sensor de distância laser, BEC escreveu um programa que calcula a posição da seringa, obtém dados de profundidade, calcula a saída de controlo PID, depois conduz o motor da seringa até à profundidade alvo.
E foi assim que BEC construiu o seu submarino Raspberry Pi + Lego. Pode ler aqui o post do blogue de 10 partes.
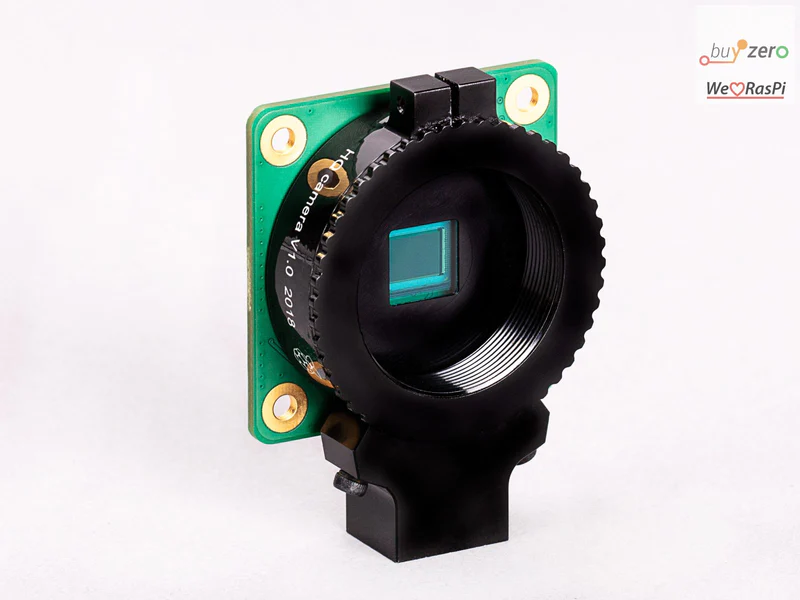
Câmara de Pieca

Tom Schucker construiu a sua Pieca utilizando uma Raspberry Pi 4, a Câmara de Alta Qualidade Raspberry Pi, um visor 5″ que se ligava através da porta DSI e uma caixa impressa 3D. Todo o sistema é alimentado pelo sistema de bateria PiSugar.
É o projeto Raspberry Pi ideal para tirar fotografias do seu novo submarino Lego!
A câmara também tem outras características excitantes, tais como um módulo GPS, um medidor de duração da bateria e uma unidade USB para facilitar a transferência de ficheiros.

Utilizar qualquer lente telescópica M-mount
A melhor parte deste projecto é a capacidade de utilizar qualquer lente telescópica M39.
Ao longo do século passado, muitas destas lentes foram produzidas. Pode-se comprar lentes de fabrico russo muito baratas e também se podem comprar lentes de fabrico alemão.
Estas lentes foram criadas numa era de câmaras manuais sem autofoco ou abertura automática. Assim, teria de definir a sua abertura e focar-se na lente, tal como o faria com um velho telémetro.
Todas as imagens são ampliadas
A utilização de uma lente destinada ao formato de 35mm num sensor mais pequeno significaria que todas as imagens são inerentemente ampliadas.
Pense desta forma: as lentes destinam-se a projectar uma imagem de 35mm x 24mm. No entanto, o sensor pode apenas captar uma imagem de 6mm x 4,5mm dessa imagem de 35mm x 24mm. Isto significa que todas as imagens são cortadas (e, por conseguinte, parecem ter sido ampliadas).
O Tom compensou utilizando um redutor focal que reduz para metade a distância focal das lentes.
Vídeo
Interessado em mais projectos Raspberry Pi?
Pode consultar a nossa série de Projectos Paragon aqui.
O que faria com um submarino de lego e uma câmara pieca?