Projectos Raspberry Pi: Soluções modernas exigem soluções mais modernas!
Esta semana, trazemos-lhe algumas moderno Projectos Raspberry Pi!
Já viu o meme que diz: "Problemas modernos exigem soluções modernas?"
Bem, o que acontece se as suas soluções modernas criarem alguns problemas modernos?
Então, precisa de uma solução moderna.
Por conseguinte, as soluções modernas exigem soluções modernas.
No entanto, por vezes, estes problemas são tão pequenos que os fabricantes não se dão ao trabalho de criar uma solução para si.
Felizmente, como entusiastas do Raspberry Pi, o nosso engenho é infinito.

Desativar o arranque e paragem automáticos do motor
O consumo de combustível é muito importante hoje em dia, com os preços da gasolina a disparar.
Para seu crédito, os fabricantes de automóveis criaram uma solução que pára o motor quando detecta que o carro está ao ralenti. Isto ajuda realmente o seu carro a poupar gasolina quando está parado.
Mas algumas pessoas preferem não o usar e eu percebo porquê.
Há algum tempo, estava num carro moderno alugado. Descobri que, com o sistema de arranque automático ativado, tinha de "planear" a pressão dos travões para poder ligar o motor antes de o semáforo ficar verde.
Por vezes, esquecia-me e ficava parado no verde durante mais tempo do que gostaria. Para compensar, pisava com mais força no acelerador. Não recomendado.
Alguns fabricantes de automóveis não dão a possibilidade de desativar a função "stop-start" automático. Se a quiser desativar, tem de premir o botão sempre que conduzir.
Agora já não!
Descrição do projeto
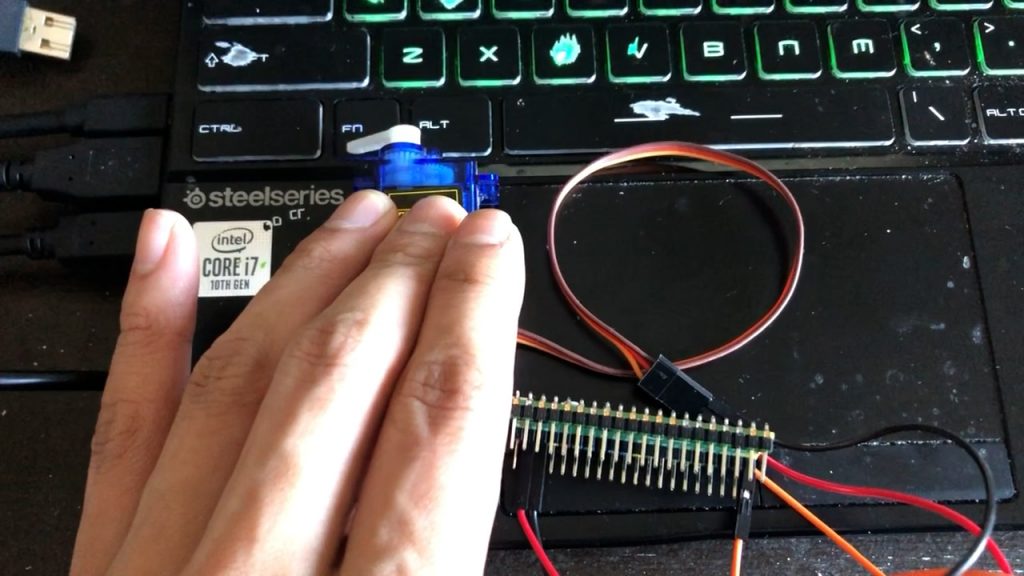
O que está a ver no vídeo acima é um produto comercial, mas pode ser facilmente realizado com um Raspberry Pi Pico e um servo SG90. A energia para o Raspberry Pi Pico pode ser fornecida pelas portas USB do carro.
O código MicroPython básico é este e assume que ligaste a linha de sinal do servo à GPIO 16.
from time import sleep
from machine import Pin
from machine import PWM
pwm = PWM(Pin(16))
pwm.freq(50)
pwm.duty_ns(2000000)
sleep(0.5)
pwm.duty_ns(500000)
Existem alguns desafios a este respeito:
Primeiro, é necessário ajustar o ângulo do servo. Este é ajustado pelo valor passado para pwn_duty_ns, que é em nanossegundos.
2 milhões de nanossegundos (2.000.000) equivalem a uma rotação completa e 500.000 a uma rotação completa na direção oposta.
No final, utilizei apenas 1.000.000 a 2.000.000 de nanossegundos, em vez da gama completa do servo.
Em segundo lugar, tem de saber como desativar a função start-stop do seu automóvel. Alguns exigem que prima e mantenha premido, pelo que terá de ajustar o botão dormir comprimento.
Em terceiro lugar, o objetivo é que isto funcione apenas quando o motor está ligado e não quando se liga o rádio. Este é provavelmente o maior desafio porque não existe uma forma fácil de dizer ao Pico quando o motor está ligado.
Mas o mesmo projeto - operar um servo com o Raspberry Pi Pico pode, na verdade, ser muito benéfico para muitos outros projectos, como um interrutor de comutação. Eu uso este método exato para ficar na cama e apagar as luzes do quarto.
Ou pode ser utilizado para parar um protetor de ecrã premindo um botão aleatório (como INSERT).
OpenMower: Cortador de relva robótico com GPS
"Os cortadores de relva robóticos não prestam!"
É o que diz Clemens Elflein, o criador do OpenMower.
A sua queixa é que estes robots são demasiado burros.
"Basicamente, todos estes robôs conduzem numa direção aleatória até atingirem o limite do relvado, rodam durante um período aleatório e repetem. Acho que podemos fazer melhor!"
Assim, em vez de um método de corte de relva aleatório, Clemens procurou algo mais preciso, integrando o GPS. A vantagem aqui é que o robô corta-relva também pode navegar autonomamente até ao quintal e cortar a relva lá!
Um robô corta-relva é uma solução moderna para reduzir a tarefa repetitiva de cortar a relva. Mas não é suficientemente bom.
Lembre-se porque está a ler isto... soluções modernas requerem soluções mais modernas!
Objectivos do projeto
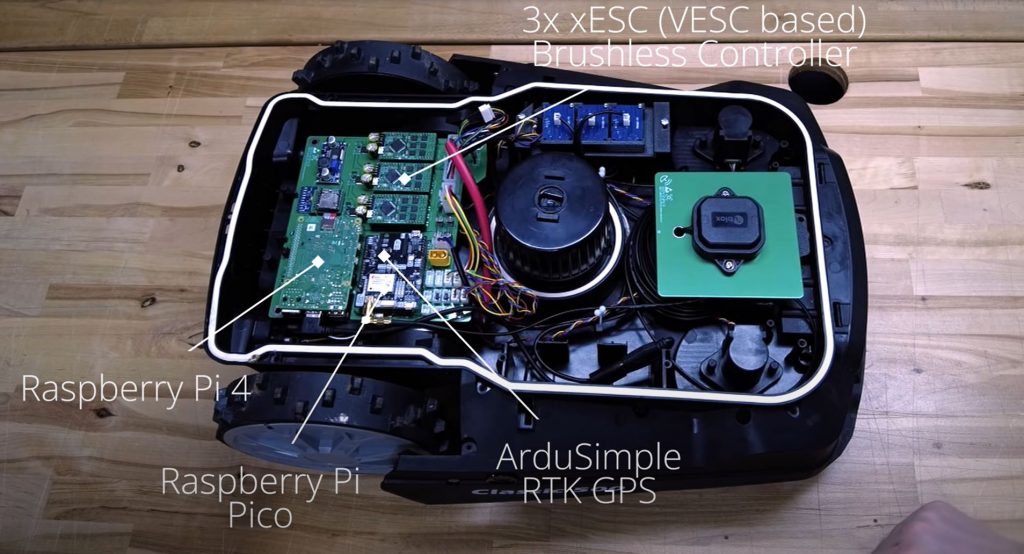
Clemens utilizou um produto comercial chamado YardForce Classic 500 e instalou um Raspberry Pi 4 e um Raspberry Pi Pico.
Tal como indicado no seu GithubEstes são os seus objectivos:
Corte autónomo da relva: Obviamente, o dispositivo deve ser capaz de cortar a relva automaticamente.
- Boa segurança: O dispositivo deve ser seguro, por exemplo, paragem de emergência em caso de elevação ou colisão.
- Não é necessário arame de perímetro: Queremos ser flexíveis e suportar várias áreas de corte.
- Baixo custo: Deve ser mais barato do que um produto de gama média disponível no mercado
- Aberto: Quero partilhar conhecimentos e permitir que outros construam também um OpenMower.
- Bonito de se ver: Não deve ter vergonha de ter um OpenMower a cortar a sua relva.
- Evitar obstáculos: O cortador de relva deve detetar obstáculos e evitá-los durante o corte.
- Deteção de chuva: O dispositivo deve ser capaz de detetar más condições climatéricas e interromper o corte da relva até que estas melhorem.
Consegues fazê-lo?
Clemens criou um grupo no Discord e as pessoas estão a participar diariamente.
Ele não recomenda que se faça isso a menos que se saiba o que se está a fazer.
Ele deixa bem claro, com um aviso, que se alguma coisa correr mal, não lhe venham bater à porta.
Junte-se ao OpenMower's Discórdia ou ver os seus GitHub.
Não há cocó, Sherlock: como se livrar do cocó de cão no quintal
Caleb Olson tem um corgi que deixa excrementos por todo o seu quintal.
Inicialmente, concebeu um sistema que assinala o local onde o seu cão, Twinkie, deixa cair o cocó e marca-o numa imagem. Uma solução moderna.
Mas a solução moderna revelou-se "demasiado trabalhosa", uma vez que tem de consultar o telemóvel para ter uma ideia de onde se encontram os locais.
E o que é que ele fez? Instalou um braço robótico com um laser que aponta para onde está o cocó.
Soluções modernas exigem soluções mais modernas.
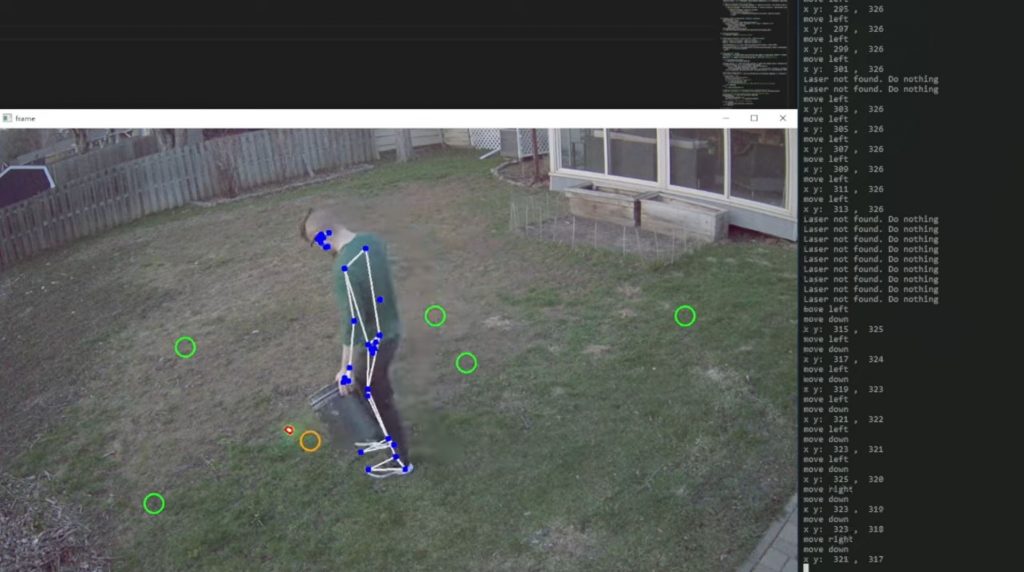

A visão por computador é crucial para esta tarefa, uma vez que inicia a orientação por laser do cocó. Ao cruzar os braços, o computador inicia o sistema de orientação apontando para o primeiro ponto de cocó.
Depois, quando ele se abaixa para apanhar o cocó, o OpenCV detecta isso e leva-o para o próximo local de cocó.
Vocês têm algum desses... projectos?
Passo a pente fino o Reddit, o Twitter e outros sites diariamente para encontrar projectos interessantes para apresentar na PiCockpit Newsletter.
Também pode consultar a nossa série de Projectos Paragon aqui.
Se tem conhecimento de um projecto interessante, deixe um comentário abaixo 👇
Se gostar desta série, subscreva a nossa newsletter abaixo 👇