Progetti Raspberry Pi: Le soluzioni moderne richiedono soluzioni più moderne!
Questa settimana vi presentiamo alcune moderno Progetti Raspberry Pi!
Avete mai visto il meme che recita: "I problemi moderni richiedono soluzioni moderne"?
Ebbene, cosa succede se le vostre soluzioni moderne creano problemi moderni?
Allora avete bisogno di una soluzione moderna.
Pertanto, le soluzioni moderne richiedono soluzioni moderne.
A volte, però, questi problemi sono così lievi che i produttori non si preoccupano di creare una soluzione per voi.
Fortunatamente, come appassionati di Raspberry Pi, la nostra ingegnosità è infinita.

Disattivare l'avvio automatico del motore
Il consumo di carburante è molto importante in questi giorni, con i prezzi della benzina alle stelle.
I produttori di automobili hanno creato una soluzione che spegne il motore quando rileva che l'auto è al minimo. Questo aiuta davvero a risparmiare benzina quando l'auto è ferma.
Ma alcune persone preferiscono non averla e posso capire perché.
Qualche tempo fa ho noleggiato un'auto moderna. Con il sistema di avviamento automatico attivato, ho dovuto "pianificare" la pressione dei freni per poter avviare il motore prima che il semaforo diventasse verde.
A volte me ne dimenticavo e rimanevo fermo al verde più a lungo di quanto avrei voluto. Per compensare, ho accelerato di più. Non è consigliabile.
Alcune case automobilistiche non offrono la possibilità di disattivare la funzione di arresto automatico. Se si desidera disattivarla, è necessario premere il pulsante ogni volta che si guida.
Non più!
Schema del progetto
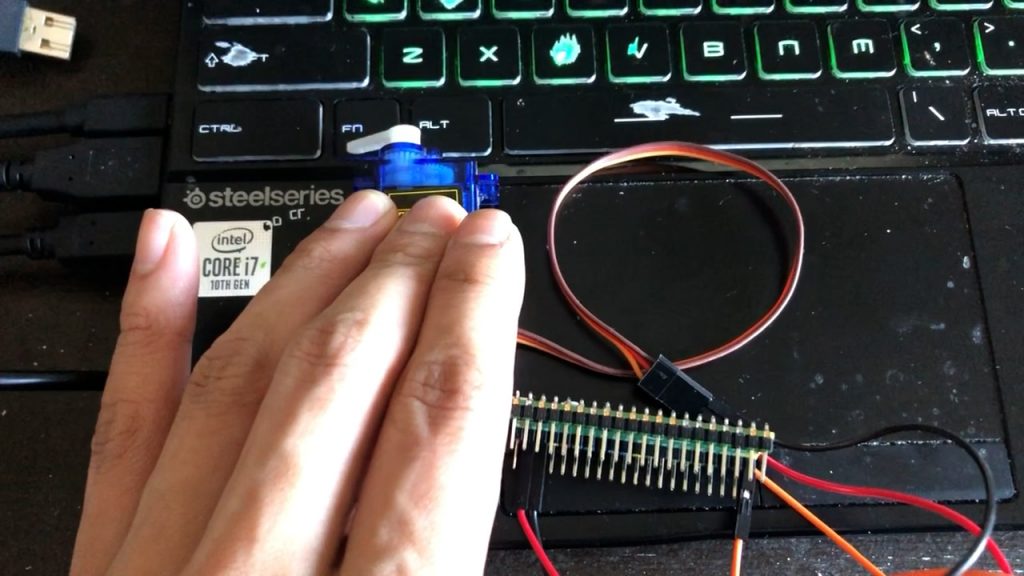
Quello che vedete nel video qui sopra è un prodotto commerciale, ma può essere facilmente realizzato con un Raspberry Pi Pico e un servo SG90. L'alimentazione del Raspberry Pi Pico può essere fornita dalle porte USB dell'auto.
Il codice MicroPython di base è questo e presuppone che sia stata collegata la linea di segnale del servo al GPIO 16.
from time import sleep
from machine import Pin
from machine import PWM
pwm = PWM(Pin(16))
pwm.freq(50)
pwm.duty_ns(2000000)
sleep(0.5)
pwm.duty_ns(500000)
Ci sono alcune sfide da affrontare:
Innanzitutto, è necessario regolare l'angolo del servo. Questo viene regolato dal valore passato in pwn_duty_ns, che è in nanosecondi.
2 milioni di nanosecondi (2.000.000) equivalgono a una rotazione completa e 500.000 a una rotazione completa nella direzione opposta.
Alla fine, ho usato solo da 1.000.000 a 2.000.000 di nanosecondi, piuttosto che l'intera gamma del servo.
In secondo luogo, è necessario sapere come disattivare la funzione start-stop dell'auto. In alcuni casi è necessario premere e tenere premuto, per cui è necessario regolare il pulsante di accensione e spegnimento. dormire lunghezza.
In terzo luogo, si desidera che questo funzioni solo quando il motore è acceso e non quando si avvia la radio. Questa è probabilmente la sfida più grande, perché non c'è un modo semplice per dire al Pico quando il motore è acceso.
Ma lo stesso progetto - azionare un servo con il Raspberry Pi Pico può in realtà essere molto utile per molti altri progetti, come ad esempio la commutazione di un interruttore. Io uso questo metodo per rimanere a letto e spegnere le luci della camera da letto.
Oppure può essere usato per fermare uno screensaver premendo un pulsante a caso (come INSERT).
OpenMower: Rasaerba robotizzato con GPS
"I tosaerba robotici fanno schifo!".
Questo è quanto afferma Clemens Elflein, il creatore di OpenMower.
La sua lamentela è che questi robot sono troppo stupidi.
"In pratica tutti questi bot guidano in una direzione casuale fino a toccare il confine del prato, ruotano per una durata randomizzata e ripetono. Penso che possiamo fare di meglio!".
Quindi, invece di un metodo di taglio del prato casuale, Clemens ha cercato qualcosa di più preciso integrando il GPS. Il vantaggio è che il robomower può anche navigare autonomamente fino al giardino di casa e tagliare l'erba lì!
Il robomower è una soluzione moderna per ridurre il compito ripetitivo di tagliare il prato. Ma non è sufficiente.
Ricordate perché state leggendo questo articolo... le soluzioni moderne richiedono soluzioni più moderne!
Obiettivi del progetto
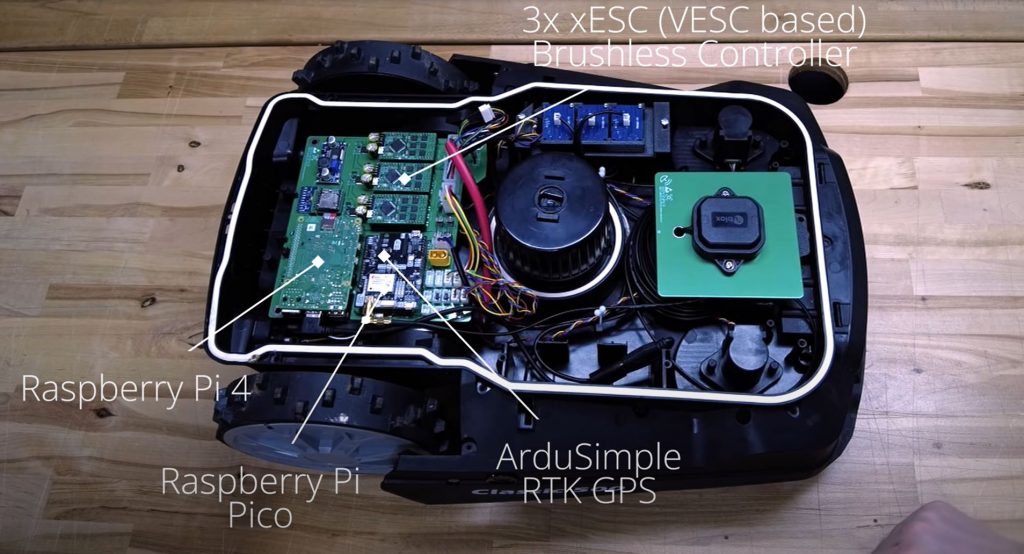
Clemens ha utilizzato un prodotto commerciale chiamato YardForce Classic 500 e ha installato un Raspberry Pi 4 e un Raspberry Pi Pico.
Come dichiarato nel suo GithubQuesti sono i suoi obiettivi:
Taglio autonomo del prato: Ovviamente, il dispositivo deve essere in grado di tagliare il prato automaticamente.
- Buona sicurezza: Il dispositivo deve essere sicuro, ad esempio con arresto di emergenza in caso di sollevamento o caduta.
- Non sono necessari fili perimetrali: Vogliamo essere flessibili e supportare più aree di taglio.
- Costo ridotto: deve essere più economico di un prodotto di fascia media
- Open: voglio condividere le conoscenze e consentire anche ad altri di costruire un OpenMower.
- Bello da vedere: Non ci si deve vergognare di avere un OpenMower che taglia il prato.
- Evitare gli ostacoli: Il tosaerba deve rilevare gli ostacoli ed evitarli durante la falciatura.
- Rilevamento della pioggia: Il dispositivo deve essere in grado di rilevare le condizioni meteorologiche avverse e di sospendere la falciatura in attesa di un miglioramento.
Puoi farlo?
Clemens ha creato un gruppo Discord e le persone partecipano quotidianamente.
Non consiglia di farlo se non si sa cosa si sta facendo.
Lo dice chiaramente con una clausola di esclusione di responsabilità: se qualcosa va storto, non venite a bussare alla sua porta.
Unisciti a OpenMower Discordia o vedere il loro GitHub.
Niente cacca, Sherlock: un'eccessiva ingegnerizzazione per eliminare la cacca del cane in giardino
Caleb Olson ha un corgi che lascia escrementi in tutto il giardino.
Inizialmente, ha progettato un sistema che individua i punti in cui il suo cane, Twinkie, fa la cacca e li segna su un'immagine. Una soluzione moderna.
Ma la soluzione moderna si è rivelata "troppo faticosa", in quanto deve fare riferimento al suo telefono per avere un'idea della posizione dei luoghi.
Che cosa ha fatto? Ha installato un braccio robotico con un laser che indica dove si trova la cacca.
Le soluzioni moderne richiedono soluzioni più moderne.
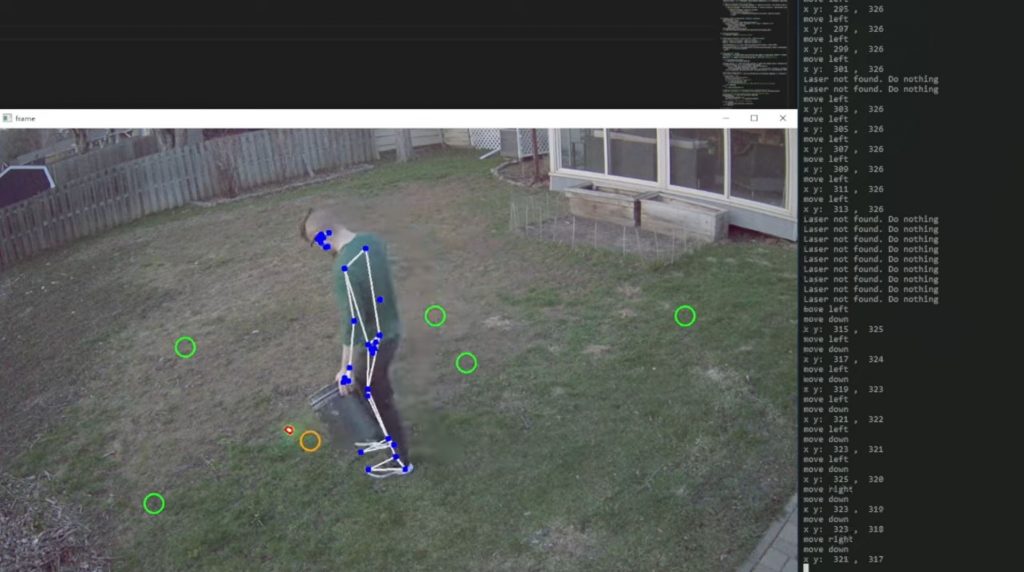

La visione computerizzata è fondamentale per questo compito, in quanto avvia la guida laser della cacca. Incrociando le braccia, il computer avvia il sistema di guida indicando il primo punto di cacca.
Poi, quando si china per raccoglierla, OpenCV lo rileva e lo sposta al punto di cacca successivo.
Avete tutti uno di questi... progetti?
Ogni giorno setaccio Reddit, Twitter e altri siti web per trovare progetti interessanti da inserire nella newsletter di PiCockpit.
Potete anche consultare la nostra serie di progetti Paragon qui.
Se siete a conoscenza di un progetto interessante, lasciate un commento qui sotto 👇
Se vi piace questa serie, iscrivetevi alla nostra newsletter qui sotto 👇