Construire un gant de réalité virtuelle

Si vous voulez en savoir plus sur la réalité virtuelle, voici le projet le plus intéressant que vous puissiez trouver. Dans cet article, nous allons vous montrer comment construire un gant de réalité virtuelle programmable.
Le gant est basé sur un Raspberry Pi Pico, a MCP3008 ADC et cinq capteurs flexibles que vous pouvez même construire vous-même !
Ce dont vous avez besoin
Voici une liste des éléments dont vous avez besoin pour ce projet
- Raspberry Pi Pico
- Câble MicroUSB / USB
- MCP3008 ADC
- Cinq capteurs flexibles
- Un fil ou des fils de liaison
- Cinq résistances de 330Ω
- Équipement de soudure (facultatif)
- Planche à pain (facultatif)
Si vous préférez un guide vidéo alors nous vous couvrons.
Construisez vos capteurs flexibles
Comme la plupart des capteurs flexibles coûtent environ 10$ la pièce, il est beaucoup moins cher de les fabriquer soi-même.
Cette vidéo montre comment faire, bien que nous ayons apporté quelques modifications pour améliorer les performances.
Remplacez la bande de papier interne par du velostat et la feuille d'aluminium par une bande de cuivre. Faites également des bandes très fines (environ 1 mm pour la bande de cuivre et 2 mm pour le velostat) pour augmenter la résistivité du capteur. L'augmentation de la résistivité entraîne une meilleure résolution.

Vous pouvez également souder le circuit diviseur de tension pour enlever quelques fils de la planche à pain. Soudez un fil rouge à une extrémité. Le fil rouge sera le contact positif. Soudez un fil jaune à l'autre extrémité. Après le fil jaune, vous devez connecter une résistance de 330 Ohm qui sera reliée à la masse.
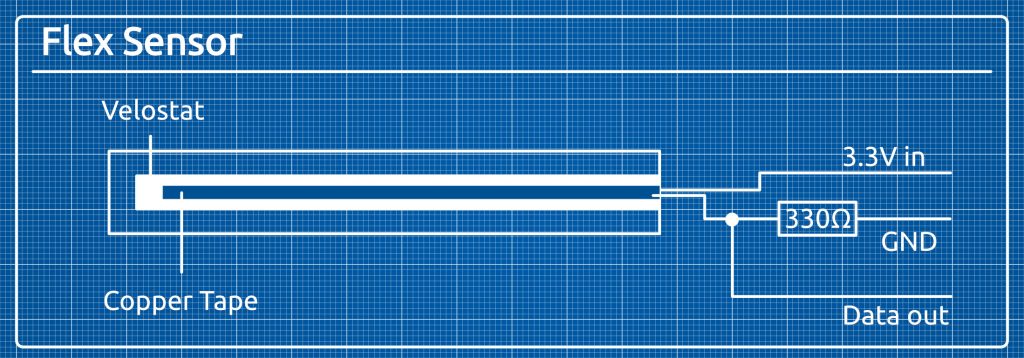
Dans mon cas, la résistance se trouve à l'extrémité du fil noir et je l'ai isolée avec une gaine thermorétractable.
Le fil jaune servira de câble de données.
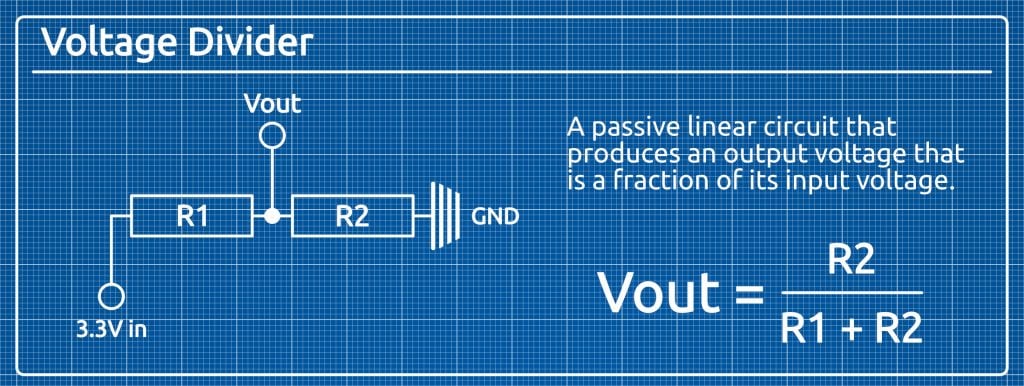
Le circuit diviseur de tension
Un circuit diviseur de tension est couramment utilisé dans le domaine de l'embarqué. Il consiste en deux résistances en série avec une connexion de sortie entre les deux.
Il fournit une fraction de la tension d'entrée et la quantité précise dépend de la résistivité des deux résistances.
Câblage
Connectez votre MCP3008 à votre Raspberry Pi Pico selon ce graphique.
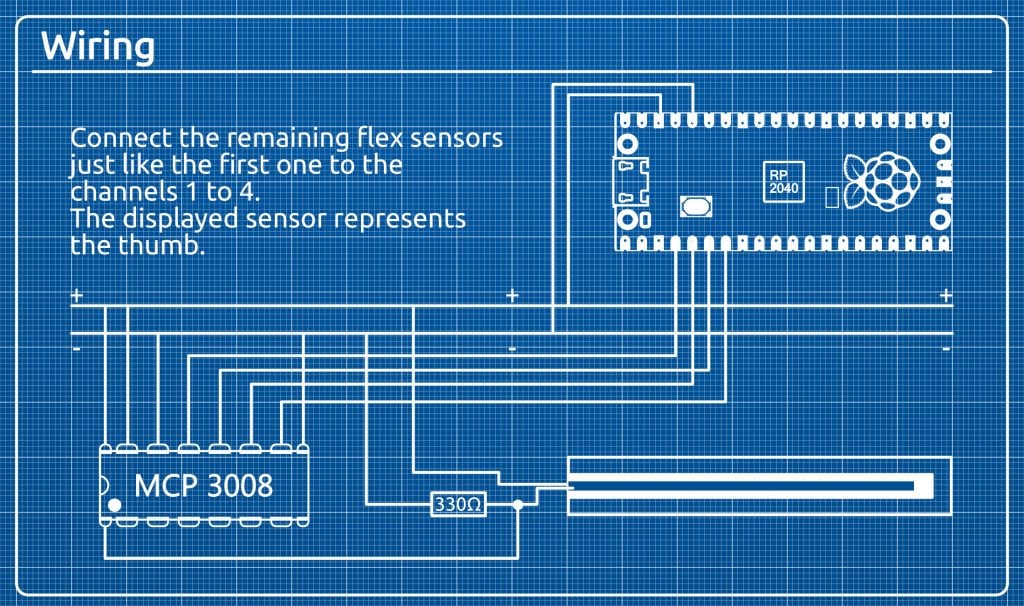
Nous avons une explication étape par étape dans notre vidéo.
Connectez les capteurs flexibles comme sur le graphique. Les huit broches sur le côté gauche du MCP3008 sont les canaux 0 à 7 (de haut en bas). Connectez le fil de données du capteur flexible pour le pouce au canal 0, l'index au canal 1, le majeur au canal 2, l'annulaire au canal 3 et l'auriculaire au canal 4.
Si vous souhaitez modifier l'ordre ou ajouter des capteurs supplémentaires, vous devez modifier le logiciel du Pico.
Configurer le logiciel du VR Glove
Configurer le Pico
Dans cette configuration, le MCP3008 convertit le signal analogique du capteur de flexion en signal numérique. Le Pico lit ensuite les données et les envoie à un PC Windows via USB Serial.
Pour le Pico, nous utiliserons Circuit Python car il fournit un module MCP3008 qui nous facilite vraiment les choses. Pour installer Circuit Python sur votre Pico, téléchargez le fichier .uf2 à partir du fichier Site officiel de Pico Circuit Python.
Connectez votre Pico via USB tout en maintenant le bouton BOOTSEL bouton. Ensuite, faites glisser et déposez le .uf2 sur le Pico. Le Pico sera remonté en tant que CIRCUITPY.
Téléchargez et extrayez le mcp3xxx Bibliothèque Python de circuit qui contient -mpy- de ce site.

Il contient un dossier lib, que vous devez copier sur le Pico (qui est maintenant le lecteur CIRCUITPY).
Ensuite, téléchargez le script code.py depuis notre Dépôt GitHub et le copier sur le Pico.
Maintenant, chaque fois que vous allumez votre Pico (sans en maintenant le bouton BOOTSEL), il lira les cinq premiers canaux du MCP3008 et enverra les données au port série USB.
Configurer Blender
L'étape suivante consiste à installer Blender pour votre système d'exploitation. Cet exemple a été testé pour Windows, mais il devrait fonctionner sur d'autres systèmes d'exploitation également, avec quelques modifications mineures.
Nous avons besoin du module Python PySerial pour lire les données série du Pico dans notre script Python. Blender est livré avec sa propre version de Python. Assurez-vous d'y installer PySerial.
Vérifiez notre vidéo pour apprendre comment installer PySerial dans Blender sous Windows.
Maintenant, téléchargez le main.blend de notre GitHub et ouvrez-le dans Blender.
Vous devriez voir une main 3D à gauche et un script Python à droite. A la ligne 73, un objet "Serial" est créé. Vous devez passer le nom de votre port série USB au constructeur (qui dans mon cas était "COM4").
Conclusion
Vous voulez voir d'autres projets que vous pouvez réaliser avec un Raspberry Pi Pico ?
Découvrez notre série de projets Paragon en cliquant sur ce bouton :
Que ferez-vous avec votre nouveau gant de réalité virtuelle ?