Bouw een Virtual Reality-handschoen

Als je meer wilt leren over VR, dan is dit het coolste project dat je kunt vinden. In dit artikel laten we je zien hoe je een programmeerbare Virtual Reality-handschoen kunt maken.
De handschoen is gebaseerd op een Raspberry Pi Pico, a MCP3008 ADC en vijf flex sensoren die je zelfs zelf kan bouwen!
Wat je nodig hebt
Hier is een lijst van dingen die je nodig hebt voor dit project
- Raspberry Pi Pico
- MicroUSB / USB kabel
- MCP3008 ADC
- Vijf flexibele sensoren
- Wat draad of jumper draden
- Vijf weerstanden van 330Ω
- Soldeerapparatuur (optioneel)
- Breadboard (facultatief)
Als u liever een videogids dan hebben we je gedekt.
Bouw uw flex sensoren
Aangezien de meeste flexsensoren ongeveer 10$ per stuk kosten, is het veel goedkoper om ze zelf te bouwen.
Deze video laat zien hoe dat moet, hoewel we enkele wijzigingen hebben aangebracht om de prestaties te verbeteren.
Vervang de interne papierstrook door velostat en de aluminiumfolie door koperband. Maak de strips ook zeer dun (ongeveer 1 mm voor de koperstrip en 2 mm voor de velostat) om de weerstand van de sensor te verhogen. Een hogere weerstand leidt tot een hogere resolutie.

U kunt ook het spanningsdelercircuit solderen om enkele draden van het breadboard te verwijderen. Soldeer een rode draad aan één uiteinde. De rode draad zal het positieve contact zijn. Soldeer een gele draad aan het andere uiteinde. Na de gele draad komt een weerstand van 330 Ohm die met massa wordt verbonden.
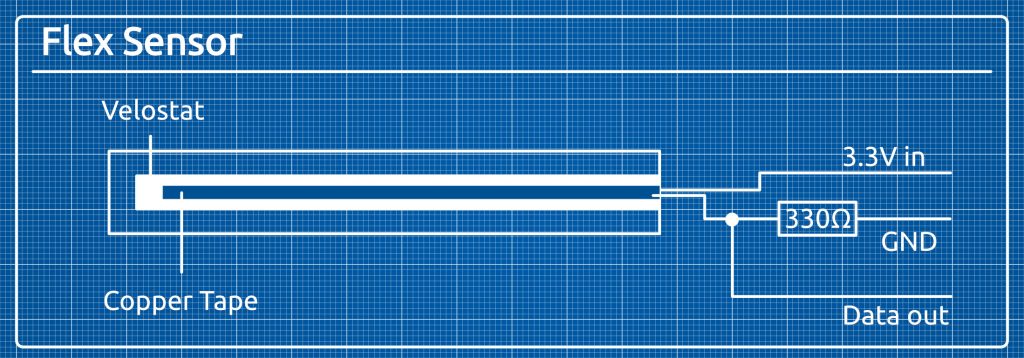
In mijn geval zit de weerstand aan het eind van de zwarte draad en ik heb hem geïsoleerd met een krimpkous.
De gele draad zal dienen als onze datakabel.
De spanningsdeler schakeling
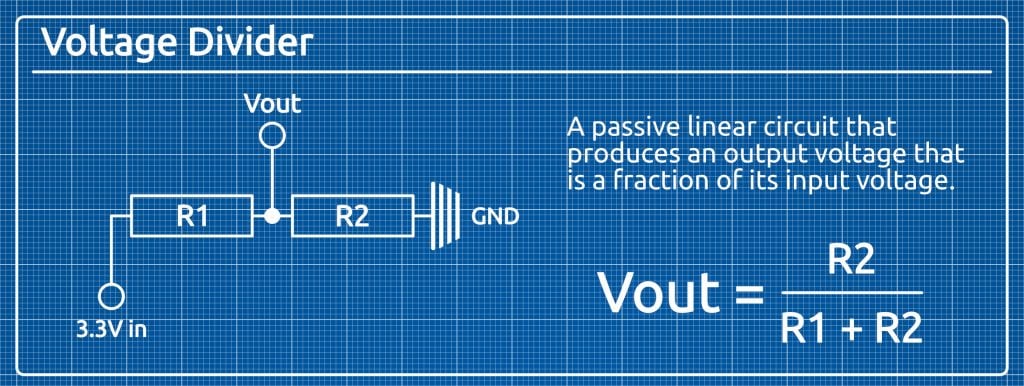
Een spanningsdeler schakeling wordt vaak gebruikt in de embedded wereld. Zij bestaat uit twee weerstanden in serie met een uitgangsaansluiting ertussen.
Hij geeft een fractie van de ingangsspanning af en de precieze hoeveelheid hangt af van het weerstandsvermogen van beide weerstanden.
Bedrading
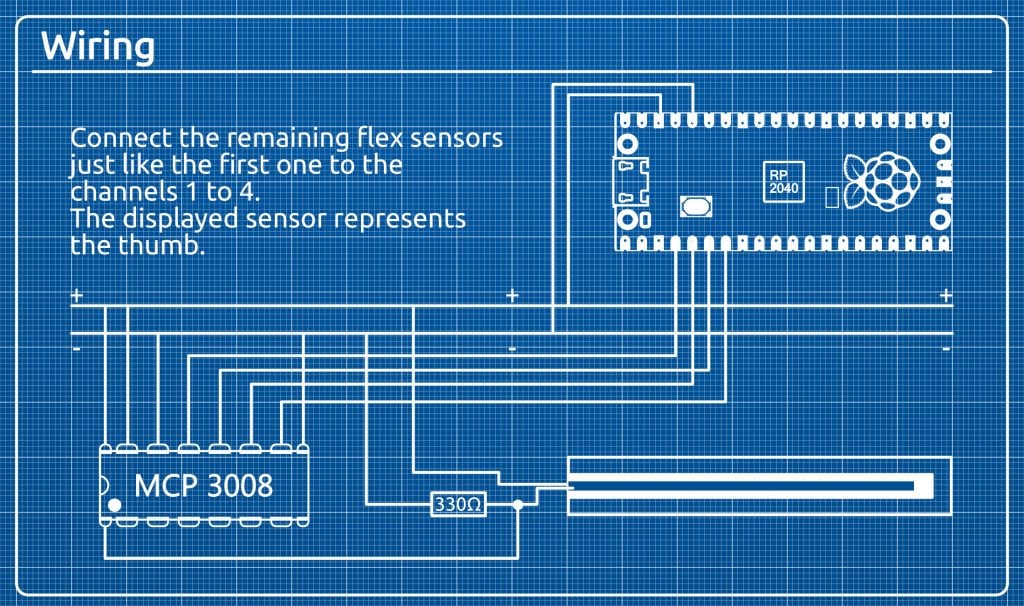
Sluit uw MCP3008 aan op uw Raspberry Pi Pico volgens deze grafiek.
We hebben een stap voor stap uitleg in onze video.
Sluit de flexsensoren aan zoals in de afbeelding. De acht pinnen aan de linkerkant van de MCP3008 zijn de kanalen 0 tot 7 (van boven naar beneden). Sluit de datadraad van de flexsensor voor de duim aan op kanaal 0, de wijsvinger op kanaal 1, de middelvinger op kanaal 2, de ringvinger op kanaal 3 en de pink op kanaal 4.
Als u de volgorde wilt wijzigen of extra sensoren wilt toevoegen, moet u de software op de Pico wijzigen.
Instellen van de VR Glove software
De Pico instellen
In deze opstelling converteert de MCP3008 het analoge signaal van de flexsensor naar een digitaal signaal. De Pico leest vervolgens de gegevens en stuurt ze via USB Serial naar een Windows PC.
Voor de Pico zullen we Circuit Python gebruiken omdat het een MCP3008 module heeft die het ons echt gemakkelijker maakt. Om Circuit Python op je Pico te installeren, download je de .uf2 bestand van de Officiële Pico Circuit Python site.
Sluit uw Pico aan via USB terwijl u de BOOTSEL knop. Sleep vervolgens de .uf2 bestand op de Pico. De Pico zal hermounten als CIRCUITPY.
Laad en pak de mcp3xxx Circuit Python Bibliotheek die bevat -mpy- van deze plaats.

Het bevat een lib map, die je naar de Pico moet kopiëren (dat is nu de CIRCUITPY drive).
Download dan het code.py script van onze GitHub-repository en kopieer het naar de Pico.
Telkens wanneer u nu uw Pico aanzet (zonder de BOOTSEL knop ingedrukt houdt) leest het de eerste vijf kanalen van de MCP3008 en stuurt de gegevens naar de USB Serial.
Blender instellen
De volgende stap is het installeren van Blender voor uw besturingssysteem. Dit voorbeeld is getest voor Windows, maar het zou ook moeten werken op andere besturingssystemen, met een paar kleine aanpassingen.
We hebben de Python module PySerial nodig om de seriële data van de Pico te lezen in ons Python script. Blender komt met zijn eigen Python versie. Zorg ervoor dat je PySerial daar installeert.
Kijk hier. onze video om te leren hoe PySerial te installeren in Blender op Windows.
Download nu de hand.mix bestand van onze GitHub en open het in Blender.
Je zou links een 3D hand moeten zien en rechts een Python Script. In regel 73 wordt een "Serial" object aangemaakt. Je moet de naam van je USB Serial Port doorgeven aan de contructor (in mijn geval was dat "COM4").
Conclusie
Wil je andere projecten zien die je kunt maken met een Raspberry Pi Pico?
Bekijk onze Paragon Projects-serie door op deze knop te klikken:
Wat ga jij doen met je nieuwe Virtual Reality Glove?