Bau eines Virtual Reality-Handschuhs

Wenn du mehr über VR erfahren willst, dann ist dies das coolste Projekt, das du finden kannst. In diesem Artikel zeigen wir dir, wie du einen programmierbaren Virtual Reality-Handschuh bauen kannst.
Der Handschuh basiert auf einem Raspberry Pi Pico, a MCP3008 ADC und fünf Flexsensoren, die Sie sogar selbst bauen können!
Was Sie brauchen
Hier ist eine Liste der Dinge, die Sie für dieses Projekt benötigen
- Raspberry Pi Pico
- MicroUSB/USB-Kabel
- MCP3008 ADC
- Fünf flexible Sensoren
- Einige Drähte oder Überbrückungsdrähte
- Fünf 330Ω-Widerstände
- Lötausrüstung (optional)
- Steckbrett (optional)
Wenn Sie eine Video-Guide dann sind Sie bei uns richtig.
Bauen Sie Ihre Flexsensoren
Da die meisten Flexsensoren etwa 10$ pro Stück kosten, ist es viel billiger, sie selbst zu bauen.
Dieses Video zeigt, wie man das macht, obwohl wir einige Änderungen vorgenommen haben, um die Leistung zu verbessern.
Ersetzen Sie den internen Papierstreifen durch Velostat und die Aluminiumfolie durch Kupferband. Machen Sie die Streifen außerdem sehr dünn (etwa 1 mm für den Kupferstreifen und 2 mm für das Velostat), um den spezifischen Widerstand des Sensors zu erhöhen. Ein höherer Widerstand führt zu einer höheren Auflösung.

Sie können auch die Spannungsteilerschaltung anlöten, um einige Drähte von der Lochrasterplatine zu entfernen. Löten Sie einen roten Draht an ein Ende. Der gelesene Draht wird der positive Kontakt sein. Löten Sie einen gelben Draht an das andere Ende. Nach dem gelben Draht müssen Sie einen 330-Ohm-Widerstand anschließen, der mit Masse verbunden wird.
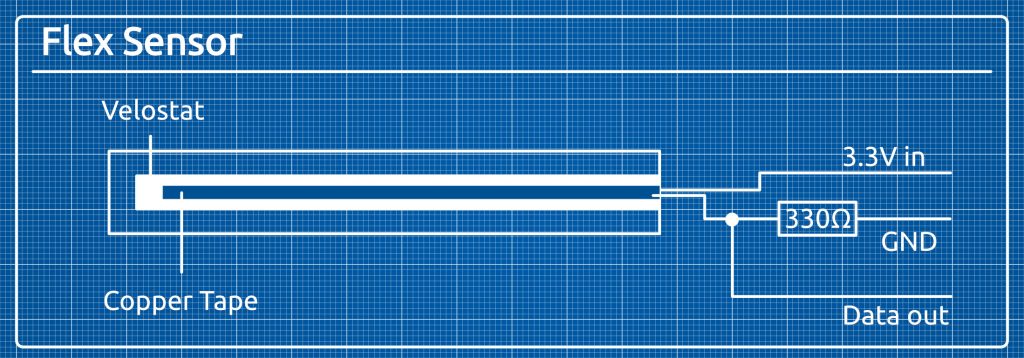
In meinem Fall befindet sich der Widerstand am Ende des schwarzen Kabels und ich habe ihn mit einem Schrumpfschlauch isoliert.
Das gelbe Kabel wird als Datenkabel verwendet.
Die Spannungsteilerschaltung
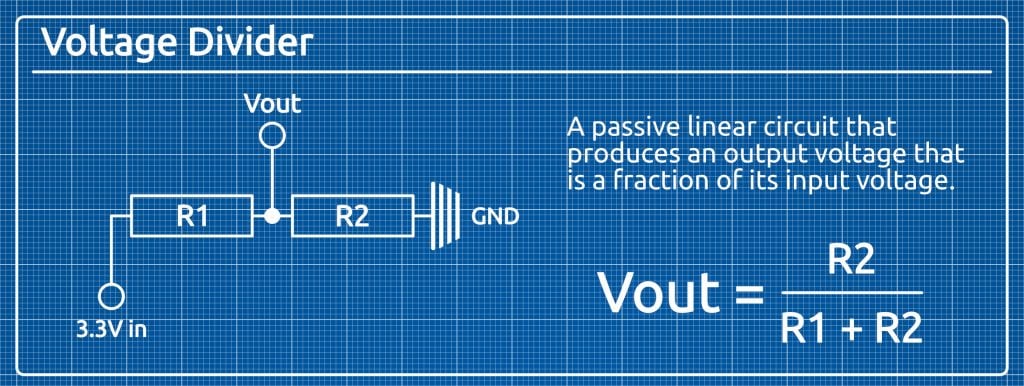
Eine Spannungsteilerschaltung wird häufig im Embedded-Bereich verwendet. Sie besteht aus zwei in Reihe geschalteten Widerständen mit einer dazwischen liegenden Ausgangsverbindung.
Er gibt einen Bruchteil der Eingangsspannung aus, wobei der genaue Wert vom Widerstand der beiden Widerstände abhängt.
Verkabelung
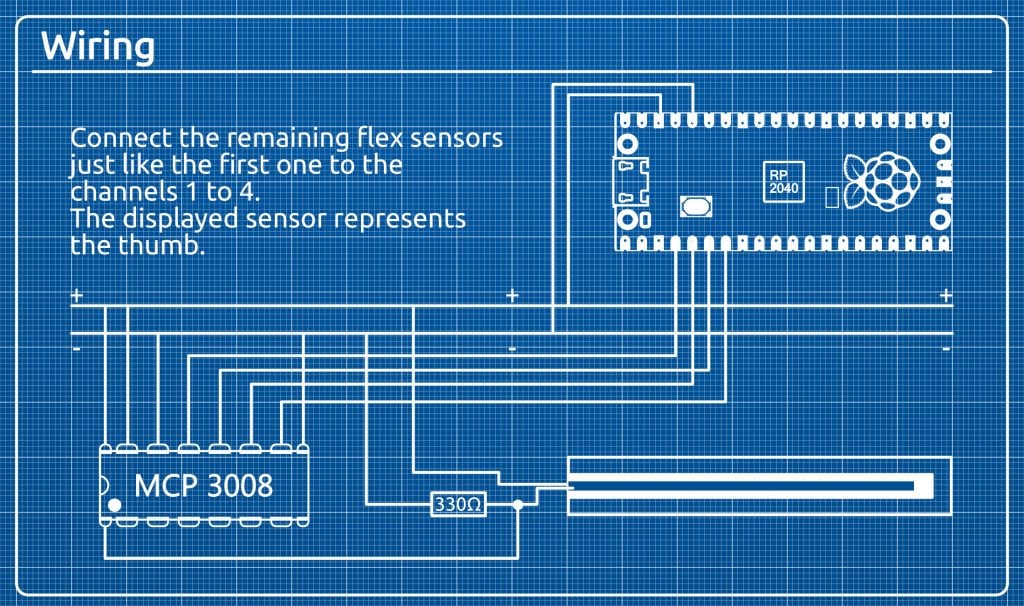
Verbinden Sie Ihren MCP3008 mit Ihrem Raspberry Pi Pico gemäß dieser Grafik.
Eine schrittweise Erklärung finden Sie unter unser Video.
Schließen Sie die Flexsensoren wie in der Grafik an. Die acht Pins auf der linken Seite des MCP3008 sind die Kanäle 0 bis 7 (von oben nach unten). Schließen Sie die Datenleitung des Flexsensors für den Daumen an Kanal 0, den Zeigefinger an Kanal 1, den Mittelfinger an Kanal 2, den Ringfinger an Kanal 3 und den kleinen Finger an Kanal 4 an.
Wenn Sie die Reihenfolge ändern oder zusätzliche Sensoren hinzufügen möchten, müssen Sie die Software auf dem Pico ändern.
Einrichten der VR Glove Software
Einrichten des Pico
Bei diesem Aufbau wandelt der MCP3008 das analoge Signal des Flexsensors in ein digitales Signal um. Der Pico liest dann die Daten und sendet sie über USB Serial an einen Windows PC.
Für den Pico werden wir Circuit Python verwenden, da es ein MCP3008-Modul bietet, das uns die Arbeit sehr erleichtert. Um Circuit Python auf Ihrem Pico zu installieren, laden Sie die .uf2 Datei aus der Offizielle Pico Circuit Python Seite.
Schließen Sie Ihren Pico über USB an, während Sie die BOOTSEL Schaltfläche. Ziehen Sie dann die .uf2 Datei auf dem Pico. Der Pico wird neu gemountet als KREISLAUF.
Donwloaden und extrahieren Sie die mcp3xxx Circuit Python Library, die Folgendes enthält -mpy- von diese Seite.

Es enthält einen lib-Ordner, den Sie auf den Pico kopieren müssen (der jetzt das Laufwerk CIRCUITPY ist).
Dann laden Sie das Skript code.py von unserer GitHub-Repository und kopieren Sie es auf den Pico.
Wenn Sie nun Ihren Pico einschalten (ohne Wenn Sie die BOOTSEL-Taste gedrückt halten, werden die ersten fünf Kanäle aus dem MCP3008 ausgelesen und die Daten an den USB Serial gesendet.
Blender einrichten
Der nächste Schritt ist die Installation von Blender für dein Betriebssystem. Dieses Beispiel wurde für Windows getestet, aber es sollte auch auf anderen Betriebssystemen funktionieren, mit ein paar kleinen Änderungen.
Wir brauchen das PySerial Python-Modul, um die seriellen Daten vom Pico in unserem Python-Skript zu lesen. Blender kommt mit einer eigenen Python-Version. Stellen Sie sicher, dass Sie PySerial dort installieren.
Überprüfen Sie unser Video um zu erfahren, wie man PySerial in Blender unter Windows installiert.
Laden Sie jetzt die hand.blend Datei von unserem GitHub und öffne sie in Blender.
Sie sollten eine 3D-Hand auf der linken Seite und ein Python-Skript auf der rechten Seite sehen. In Zeile 73 wird ein "Serial"-Objekt erstellt. Sie müssen den Namen Ihrer seriellen USB-Schnittstelle an den Konstruktor übergeben (in meinem Fall war das "COM4").
Schlussfolgerung
Möchtest du andere Projekte sehen, die du mit einem Raspberry Pi Pico machen kannst?
Schauen Sie sich unsere Paragon Projects-Serie an, indem Sie auf diese Schaltfläche klicken:
Was werden Sie mit Ihrem neuen Virtual Reality-Handschuh machen?