Создание перчатки виртуальной реальности

Если вы хотите узнать больше о VR, то это самый крутой проект, который вы сможете найти. В этой статье мы расскажем вам, как создать программируемую перчатку виртуальной реальности.
Перчатка основана на Raspberry Pi Pico, a АЦП MCP3008 и пять гибких датчиков, которые вы даже можете изготовить сами!
Что вам потребуется
Вот список вещей, которые вам понадобятся для этого проекта
- Raspberry Pi Pico
- MicroUSB / USB кабель
- АЦП MCP3008
- Пять гибких датчиков
- Некоторые провода или перемычки
- Пять резисторов 330 Ом
- Паяльное оборудование (опционально)
- Паспорт (опционально)
Если вы предпочитаете видеоинструкция тогда мы позаботимся о вас.
Создайте свои гибкие датчики
Поскольку большинство гибких датчиков стоят около 10$ за штуку, гораздо дешевле изготовить их самостоятельно.
Это видео показывает, как это сделать, хотя мы внесли некоторые изменения для улучшения производительности.
Замените внутреннюю бумажную полоску на велостат, а алюминиевую фольгу - на медную ленту. Также сделайте полоски очень тонкими (около 1 мм для медной ленты и 2 мм для велостата), чтобы увеличить удельное сопротивление датчика. Увеличение удельного сопротивления приводит к повышению разрешения.

Также вы можете припаять схему делителя напряжения, чтобы убрать некоторые провода с макетной платы. Припаяйте красный провод к одному концу. Считанный провод будет положительным контактом. К другому концу припаяйте желтый провод. После желтого провода нужно подключить резистор 330 Ом, который будет соединен с землей.
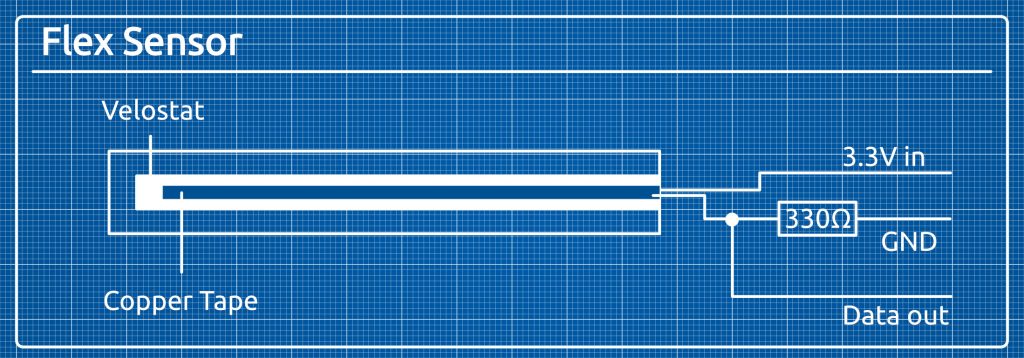
В моем случае резистор находится на конце черного провода, и я изолировал его с помощью термоусадочной трубки.
Желтый провод будет служить нашим кабелем для передачи данных.
Схема делителя напряжения
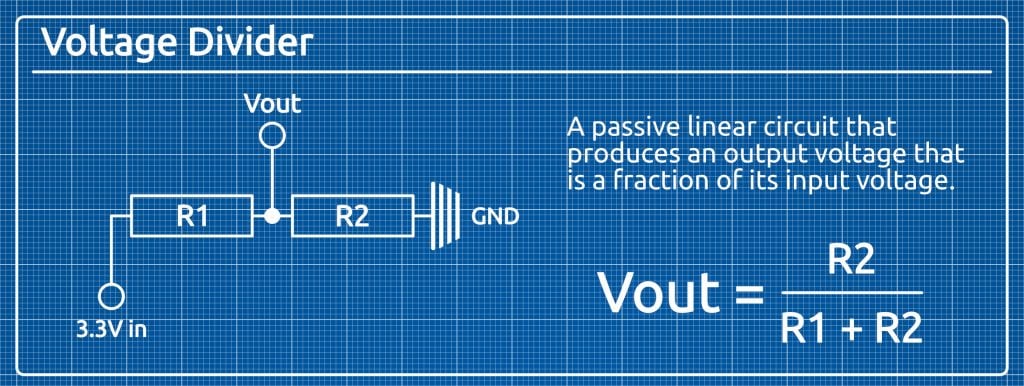
Схема делителя напряжения широко используется в сфере встраиваемых устройств. Она состоит из двух последовательно соединенных резисторов с выходным соединением между ними.
Он выдает часть входного напряжения, а точная величина зависит от удельного сопротивления обоих резисторов.
Проводка
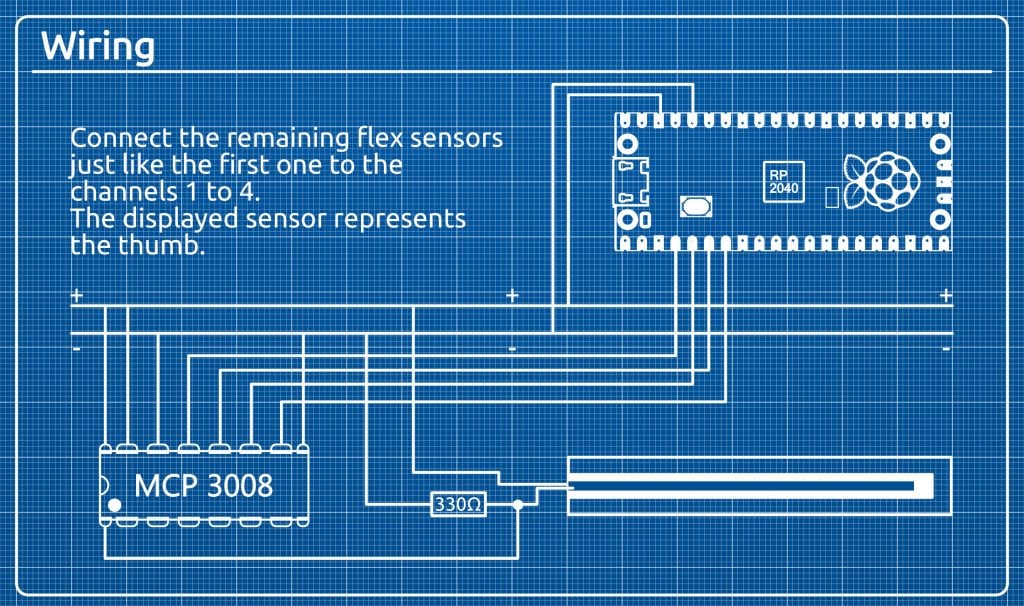
Подключите MCP3008 к Raspberry Pi Pico в соответствии с этим графиком.
У нас есть пошаговое объяснение в наше видео.
Подключите гибкие датчики, как показано на рисунке. Восемь контактов на левой стороне MCP3008 - это каналы с 0 по 7 (сверху вниз). Подключите провод данных гибкого датчика для большого пальца к каналу 0, указательного пальца к каналу 1, среднего пальца к каналу 2, безымянного пальца к каналу 3 и мизинца к каналу 4.
Если вы хотите изменить порядок или добавить дополнительные датчики, вам необходимо изменить программное обеспечение на Pico.
Настройка программного обеспечения VR Glove
Настройка Pico
В этом устройстве MCP3008 преобразует аналоговый сигнал от гибкого датчика в цифровой. Затем Pico считывает данные и отправляет их на ПК с Windows через последовательный порт USB.
Для Pico мы будем использовать Circuit Python, поскольку он предоставляет модуль MCP3008, который очень облегчает нам работу. Чтобы установить Circuit Python на ваш Pico, загрузите файл .uf2 файл из Официальный сайт Pico Circuit Python.
Подключите ваш Pico через USB, удерживая кнопку БУЦЕЛЬ кнопку. Затем перетащите .uf2 файл на Pico. Pico будет перемонтирован как ЦИРКУЛЯЦИЯ.
Загрузите и извлеките mcp3xxx Библиотека Circuit Python, которая содержит -mpy- с сайта этот сайт.

Он содержит папку lib, которую нужно скопировать на Pico (который теперь является диском CIRCUITPY).
Затем загрузите сценарий code.py из нашего Репозиторий GitHub и скопируйте его на Pico.
Теперь при каждом включении питания Pico (без удерживая кнопку BOOTSEL), он прочитает первые пять каналов с MCP3008 и отправит данные на последовательный порт USB.
Настройте блендер
Следующим шагом будет установка Blender для вашей ОС. Этот пример был протестирован для Windows, но он должен работать и на других операционных системах, с небольшими изменениями.
Нам нужен модуль PySerial Python для чтения последовательных данных с Pico в нашем сценарии Python. Blender поставляется с собственной версией Python. Убедитесь, что вы установили PySerial.
Проверьте наше видео чтобы узнать, как установить PySerial в Blender на Windows.
Теперь загрузите смесь для рук файл с нашего GitHub и откройте его в Blender.
Вы должны увидеть 3D-руку слева и Python Script справа. В строке 73 создается объект "Serial". Вам нужно передать имя вашего последовательного порта USB в конструктиве (в моем случае это был "COM4").
Заключение
Хотите посмотреть другие проекты, которые можно реализовать с помощью Raspberry Pi Pico?
Ознакомьтесь с нашей серией Paragon Projects, нажав на эту кнопку:
Что вы будете делать с новой перчаткой виртуальной реальности?