Lego Onderzeeër & Camera: Raspberry Pi Projecten
Tjonge, jonge, jonge, wat een interessante Raspberry Pi-projecten deze week.
Het eerste project is een radiografisch bestuurbare onderzeeër die kan zinken, opduiken, draaien en bewegen. Het hart van de onderzeeër is een Raspberry Pi Zero 2.
Het tweede project is een "Pieca"-camera, vernoemd naar een Leica-camera. De belangrijkste overeenkomst tussen de Pieca en een Leica is het gebruik van een M-mount verwisselbare lens, die vervolgens wordt gekoppeld aan de Raspberry Pi 4 en de High-Quality beeldsensor module.
Raspberry Pi Zero + Lego Technic onderzeeër
Vierde keer is scheepsrecht voor Baksteenexperiment kanaal (BEC), die dit project heeft gemaakt met Lego Technic-onderdelen en een Raspberry Pi Zero 2.
De grootste uitdaging voor BEC was om de onderzeeërs op de gewenste diepte te houden, maar voor het vierde project besloot hij een injectiespuit te gebruiken. De vorige drie mislukten omdat,
"Onstabiele diepte was lastig geweest bij de drie onderzeeërs die ik eerder had gemaakt, vooral bij subs 1 en 3. Die lagen altijd op de bodem of aan de oppervlakte. Die onderzeeërs lagen altijd op de bodem of aan de oppervlakte. Een goede uitdaging om te overwinnen."
Hoe BEC de Raspberry Pi integreert in de onderzeeër
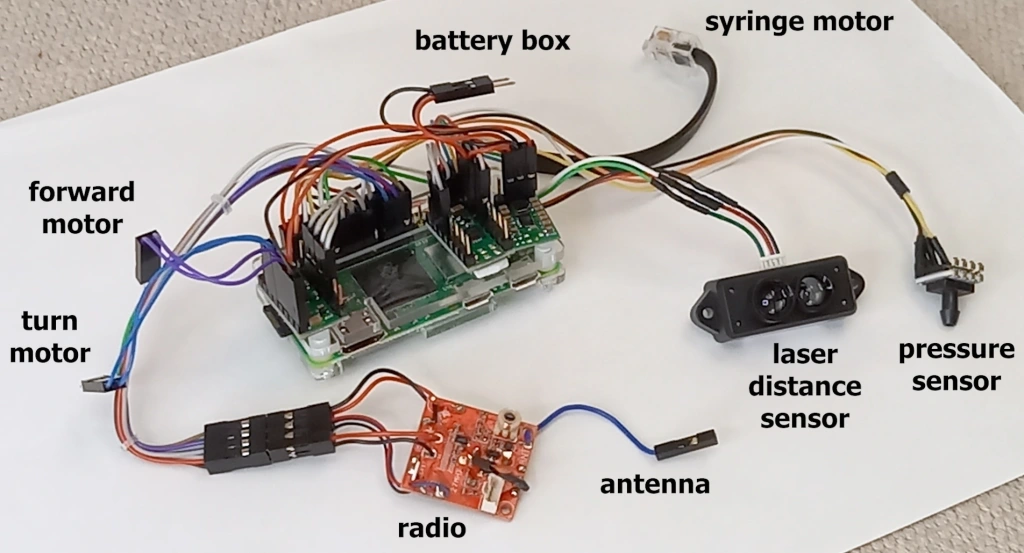
Het belangrijkste doel van de Raspberry Pi Zero 2 van BEC is om de diepte van de onderzeeër te regelen.
BEC wilde aanvankelijk een Raspberry Pi Pico gebruiken, maar het beperkte flashgeheugen van 2 MB van de Pico was te weinig voor zijn dataloggingbehoeften.
Drukgegevens verzamelen met een druksensor

BEC gebruikte een absolute druksensor in de onderzeeër.
BEC gebruikte aanvankelijk een relatieve druksensor, maar de gegevens waren niet betrouwbaar en dus schakelde hij over op een Honeywell SSCMANV030PA2A3, een absolute druksensor.
De druksensor vertelt hoe diep de onderzeeër is.
Alternatieve manier om diepte te meten: laserafstandssensor

BEC integreerde een Sparkfun TFMini-S Micro laserafstandssensor in een poging om een andere manier te vinden om diepte te meten door de afstand tot de bodem te meten.
Helaas zijn laserdieptemetingen niet erg betrouwbaar in modderig water. BEC zei: "de gegevens zijn erg fragmentarisch en niet echt bruikbaar voor controle", dus BEC heeft de laserafstandssensor niet echt veel gebruikt.
Hoe de diepte wordt bepaald

De gegevens van de dieptesensoren worden vervolgens gebruikt om de spuit aan te sturen.
De spuit is verbonden met een Lego Technic-motor die bijhoudt hoe ver de spuit is ingeduwd of ingetrokken.
Met de gegevens van de druksensor en/of de laserafstandssensor schreef BEC een programma dat de positie van de spuit berekent, de dieptegegevens ophaalt, de PID-regeluitgang berekent en vervolgens de motor van de spuit naar de gewenste diepte stuurt.
En zo bouwde BEC zijn Raspberry Pi + Lego onderzeeër. Je kunt de 10-delige blogpost hier lezen.
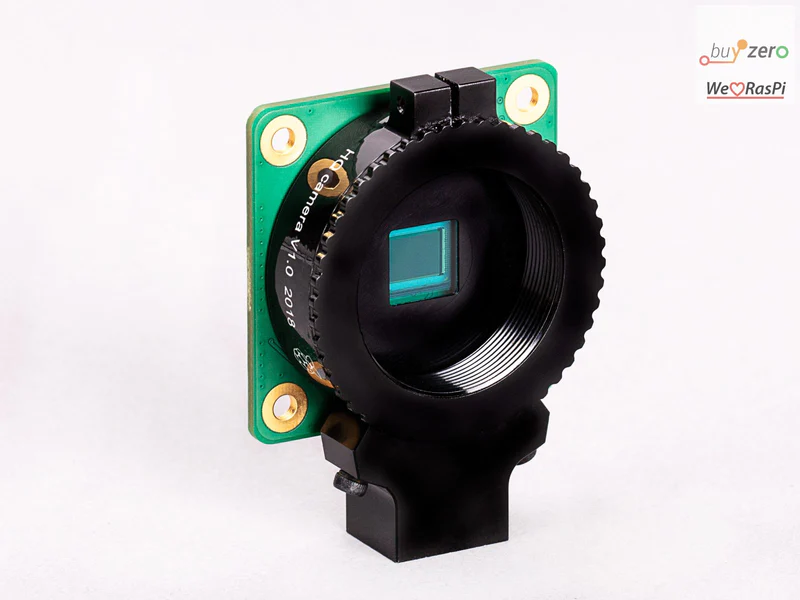
Pieca Camera

Tom Schucker bouwde zijn Pieca met behulp van een Raspberry Pi 4, de Raspberry Pi High Quality Camera, een 5″ beeldscherm dat is aangesloten via de DSI-poort en een 3D-geprinte behuizing. Het hele systeem wordt gevoed door het PiSugar batterijsysteem.
Het is het ideale Raspberry Pi-project om nu foto's te maken van je coole nieuwe Lego onderzeeër!
De camera heeft ook andere interessante functies zoals een GPS-module, een meter voor de levensduur van de batterij en een USB-stick voor het eenvoudig overzetten van bestanden.

Gebruik elk M-mount meetzoekerobjectief
Het beste aan dit project is de mogelijkheid om elke M39 meetzoekerlens te gebruiken.
In de afgelopen eeuw zijn er veel van deze lenzen geproduceerd. Je kunt heel goedkoop lenzen van Russische makelij kopen en je kunt ook lenzen van Duitse makelij kopen.
Deze lenzen zijn gemaakt in een tijdperk van handmatige camera's zonder autofocus of automatisch diafragma. Je moest dus je diafragma en scherpstelling instellen op de lens, net zoals je dat zou doen met een oude meetzoeker.
Alle afbeeldingen zijn ingezoomd
Als je een lens gebruikt die bedoeld is voor kleinbeeldformaat op een kleinere sensor, betekent dit dat alle foto's zijn ingezoomd.
Bekijk het zo: de lenzen zijn bedoeld om een beeld van 35mm x 24mm te projecteren. De sensor kan echter maar 6mm x 4,5mm van dat 35mm x 24mm beeld vastleggen. Dat betekent dat alle foto's worden bijgesneden (en er dus uitzien alsof ze zijn ingezoomd).
Tom compenseerde dit door een focal reducer te gebruiken die de brandpuntsafstand van de lenzen halveert.
Video
Geïnteresseerd in meer Raspberry Pi-projecten?
Je kunt onze Paragon Projects-serie bekijken hier.
Wat zou je doen met een lego onderzeeër en een pieca camera?