Construir uma luva de realidade virtual

Se quer aprender mais sobre RV, então este é o projeto mais fixe que vai encontrar. Neste artigo, vamos mostrar-lhe como construir uma luva de realidade virtual programável.
A luva é baseada em um Framboesa Pi Pico, a MCP3008 ADC e cinco sensores de flexão que até pode construir você mesmo!
O que é necessário
Aqui está uma lista de coisas que precisa para este projecto
- Framboesa Pi Pico
- Cabo MicroUSB / USB
- MCP3008 ADC
- Cinco sensores flex
- Alguns fios de arame ou de jumper
- Cinco resistências 330Ω
- Equipamento de soldadura (opcional)
- Tabuleiro do pão (opcional)
Se preferir um guia em vídeo então, temos-te coberto.
Construa os seus sensores flex
Uma vez que a maioria dos sensores flexíveis custa cerca de 10$ uma peça, é muito mais barato construí-los você mesmo.
Este vídeo mostra como fazer isso, embora tenhamos feito algumas alterações para melhorar o desempenho.
Substituir a tira de papel interna por velostato e a folha de alumínio por fita de cobre. Também tornar as tiras muito finas (cerca de 1 mm para a tira de cobre e 2 mm para o velostato) para aumentar a resistividade do sensor. O aumento da resistividade leva a uma maior resolução.

Também se pode soldar o circuito divisor de tensão para remover alguns fios da tábua de pão. Solde um fio vermelho até uma extremidade. O fio lido será o contacto positivo. Solde um fio amarelo até à outra extremidade. Após o fio amarelo, é necessário ligar uma resistência de 330 Ohm que será ligada à terra.
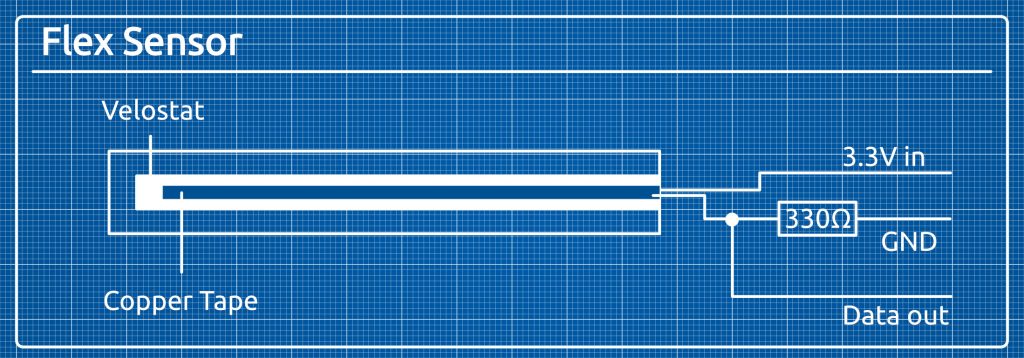
No meu caso, a resistência está no fim do fio preto e eu isolei-a com alguns tubos termoretrácteis.
O fio amarelo servirá como nosso cabo de dados.
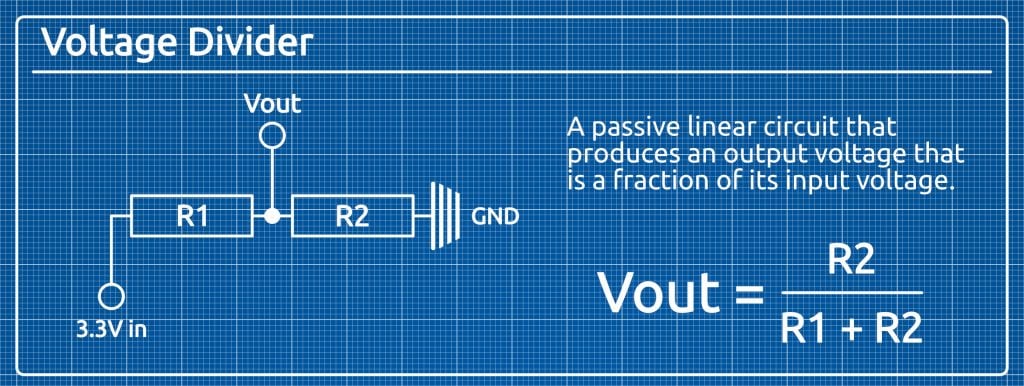
O circuito divisor de tensão
Um circuito divisor de voltagem é normalmente utilizado no domínio embutido. É composto por duas resistências em série com uma ligação de saída no meio.
Produz uma fracção da tensão de entrada e a quantidade precisa depende da resistividade de ambas as resistências.
Cablagem
Ligue o seu MCP3008 ao seu Raspberry Pi Pico de acordo com este gráfico.
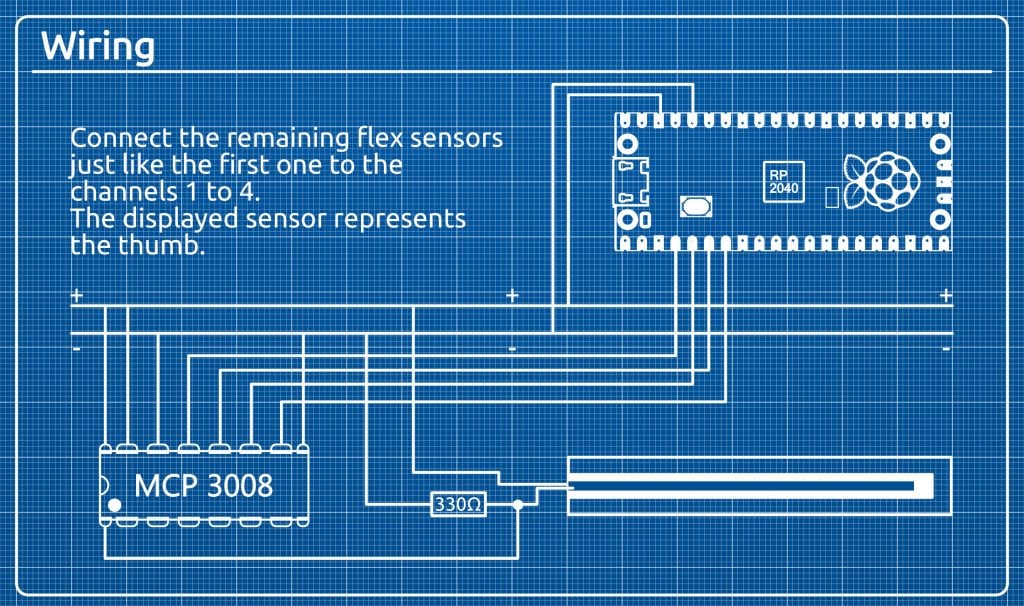
Temos uma explicação passo a passo em o nosso vídeo.
Ligar os sensores flex como o que se encontra no gráfico. Os oito pinos do lado esquerdo do MCP3008 são os canais 0 a 7 (de cima para baixo). Ligar o fio de dados do sensor flex ao canal 0, o dedo indicador ao canal 1, o dedo médio ao canal 2, o dedo anelar ao canal 3 e o dedo mindinho ao canal 4.
Se desejar alterar a encomenda ou adicionar sensores adicionais, é necessário alterar o software no Pico.
Configurar o software de luvas VR
Montar o Pico
Nesta configuração, o MCP3008 converte o singal analógico do sensor flex para um digital. O Pico lê então os dados e envia-os para um PC Windows via USB Serial.
Para o Pico utilizaremos o Circuit Python, uma vez que fornece um módulo MCP3008 que realmente nos facilita as coisas. Para instalar o Circuit Python no seu Pico, descarregue o .uf2 ficheiro do Site oficial do Circuito do Pico Python.
Ligue o seu Pico via USB enquanto segura o BOOTSEL botão. Em seguida, arrastar e largar o .uf2 arquivo no Pico. O Pico irá voltar a montar como CIRCUITÉIA.
Carregue e extraia o mcp3xxx Biblioteca do Circuito Python que contém -mpy- a partir de este sítio.

Contém uma pasta lib, que precisa de copiar para o Pico (que é agora a drive CIRCUITPY).
Depois descarregue o script code.py a partir do nosso Repositório GitHub e copiá-lo para o Pico.
Agora, sempre que ligar o seu Pico (sem segurando o botão BOOTSEL) lerá os primeiros cinco canais do MCP3008 e enviará os dados para o USB Serial.
Instalar o misturador
O passo seguinte é instalar o Blender para o seu sistema operativo. Este exemplo foi testado para Windows, mas deve funcionar também noutros sistemas operativos, com algumas pequenas modificações.
Precisamos do módulo PySerial Python para ler os Dados Serial do Pico no nosso guião Python. O misturador vem com a sua própria versão Python. Certifique-se de que instala o PySerial lá.
Confira o nosso vídeo para aprender como instalar o PySerial no Blender no Windows.
Agora descarregue o hand.blend do nosso GitHub e abri-lo no Blender.
Deve-se ver uma mão 3D à esquerda e um Python Script à direita. Na linha 73 é criado um objecto "Serial". Tem de passar o nome da sua Porta Serial USB ao contrutor (que no meu caso era "COM4").
Conclusão
Quer ver outros projectos que pode realizar com um Raspberry Pi Pico?
Veja a nossa série de Projectos Paragon clicando neste botão:
O que vais fazer com a tua nova Luva de Realidade Virtual?