Lego U-Boot & Kamera: Raspberry Pi Projekte
Diese Woche haben wir einige interessante Raspberry Pi-Projekte.
Das erste Projekt ist ein funkgesteuertes U-Boot, das sinken, auftauchen, sich drehen und bewegen kann. Das Herzstück des U-Boots ist ein Raspberry Pi Zero 2.
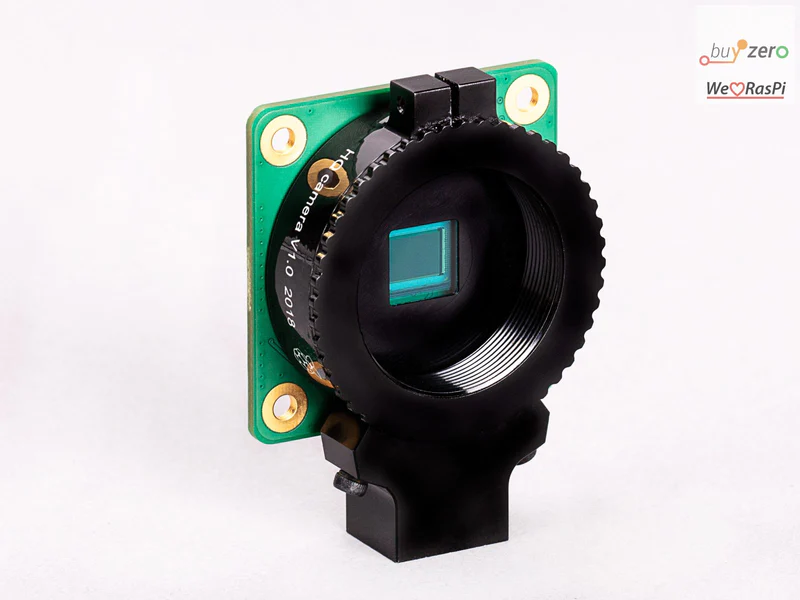
Das zweite Projekt ist eine "Pieca"-Kamera, benannt nach einer Leica-Kamera. Die Hauptähnlichkeit zwischen der Pieca und einer Leica ist die Verwendung eines M-Mount-Wechselobjektivs, das dann mit dem Raspberry Pi 4 und dem High-Quality-Bildsensormodul gekoppelt wird
Raspberry Pi Zero + Lego Technic U-Boot
Aller guten Dinge sind vier für Ziegelstein-Experimentierkanal (BEC), der dieses Projekt aus Lego Technic-Teilen und einem Raspberry Pi Zero 2 entwickelt hat.
Die größte Herausforderung für BEC war es, die U-Boote in der gewünschten Tiefe zu halten, aber für das vierte Projekt beschloss er, eine Spritze zu verwenden. Die letzten drei scheiterten, weil,
"Die instationäre Tiefe war bei den drei U-Booten, die ich früher gebaut habe, ein Problem, insbesondere bei den U-Booten 1 und 3. Diese U-Boote waren immer entweder auf dem Grund oder an der Oberfläche. Eine gute Herausforderung, die es zu meistern galt."
Wie BEC den Raspberry Pi in das U-Boot integriert
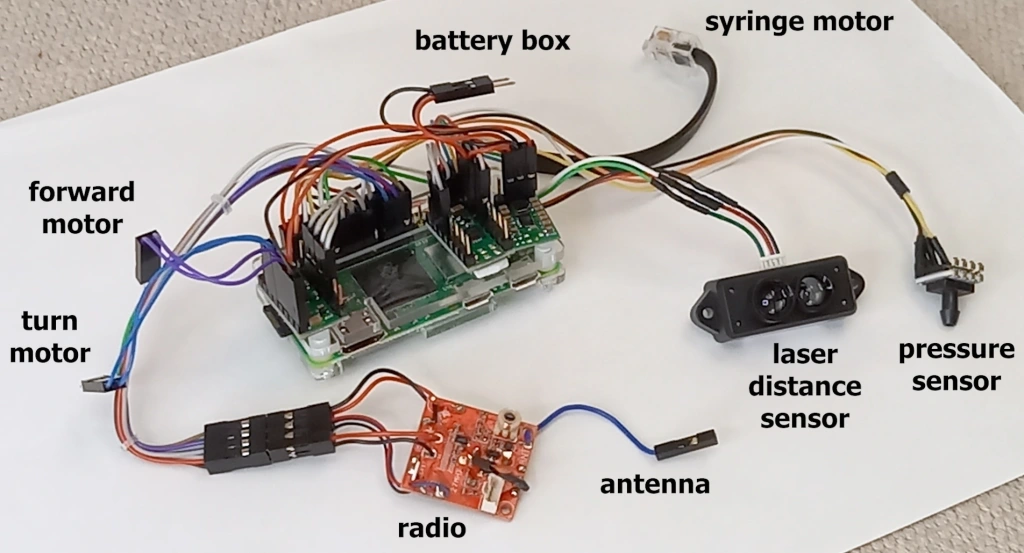
Der Hauptzweck des Raspberry Pi Zero 2 von BEC ist die Steuerung der Tiefe des U-Boots.
Ursprünglich wollte BEC einen Raspberry Pi Pico verwenden, aber der begrenzte Flash-Speicher des Pico von 2 MB war zu klein für seine Anforderungen an die Datenaufzeichnung.
Erfassen von Druckdaten mit einem Drucksensor

Das BEC verwendete einen Absolutdrucksensor im U-Boot.
BEC verwendete zunächst einen Relativdrucksensor, aber die Daten waren nicht zuverlässig, so dass er auf einen Honeywell SSCMANV030PA2A3 umstieg, der ein Absolutdrucksensor ist.
Der Drucksensor zeigt an, wie tief das U-Boot ist.
Alternative Methode zur Tiefenmessung: Laser-Distanzsensor

BEC hat einen Sparkfun TFMini-S Micro Laser-Distanzsensor integriert, um eine weitere Möglichkeit zu finden, die Tiefe zu messen, indem die Entfernung vom Boden gemessen wird.
Leider sind Lasertiefenmessungen in schlammigen Gewässern nicht sehr zuverlässig. BEC sagte: "Die Daten sind sehr lückenhaft und für die Kontrolle nicht wirklich brauchbar", also hat BEC den Laser-Entfernungssensor nicht wirklich oft benutzt.
Wie die Tiefe bestimmt wird

Die Daten der Tiefensensoren werden dann zur Steuerung der Spritze verwendet.
Die Spritze ist mit einem Lego Technic-Motor verbunden, der speichert, wie weit die Spritze eingedrückt oder zurückgezogen ist.
Mit den Daten des Drucksensors und/oder des Laser-Distanzsensors hat BEC ein Programm geschrieben, das die Position der Spritze berechnet, Tiefendaten abruft, die PID-Steuerungsausgabe berechnet und dann den Spritzenmotor auf die Zieltiefe steuert.
Und so hat BEC sein Raspberry Pi + Lego-U-Boot gebaut. Sie können den 10-teiligen Blogbeitrag hier lesen.
Pieca-Kamera

Tom Schucker hat seinen Pieca mit einem Raspberry Pi 4, der Raspberry Pi High Quality Camera, einem 5″-Display, das über den DSI-Port angeschlossen wird, und einem 3D-gedruckten Gehäuse gebaut. Das gesamte System wird durch das PiSugar-Batteriesystem mit Strom versorgt.
Es ist das ideale Raspberry Pi-Projekt, um jetzt Fotos von deinem coolen neuen Lego-U-Boot zu machen!
Darüber hinaus verfügt die Kamera über weitere interessante Funktionen wie ein GPS-Modul, eine Akkulaufzeitanzeige und einen USB-Stick für die einfache Übertragung von Dateien.

Jedes M-Mount-Entfernungsmesserobjektiv verwenden
Das Beste an diesem Projekt ist die Möglichkeit, jedes M39-Messsucherobjektiv zu verwenden.
Im Laufe des letzten Jahrhunderts wurden viele dieser Objektive hergestellt. Man kann in Russland hergestellte Objektive sehr billig kaufen, aber auch in Deutschland hergestellte.
Diese Objektive wurden in einer Zeit entwickelt, als es noch manuelle Kameras ohne Autofokus oder automatische Blende gab. Man musste also die Blende und den Fokus am Objektiv einstellen, genau wie bei einem alten Messsucher.
Alle Bilder sind vergrößert
Die Verwendung eines Objektivs für das Kleinbildformat auf einem kleineren Sensor würde bedeuten, dass alle Bilder von Natur aus vergrößert sind.
Stellen Sie sich das so vor: Die Objektive sollen ein Bild von 35 mm x 24 mm projizieren. Der Sensor kann jedoch nur 6 mm x 4,5 mm von diesem 35 mm x 24 mm großen Bild erfassen. Das bedeutet, dass alle Bilder beschnitten sind (und daher aussehen, als wären sie vergrößert).
Tom kompensierte dies durch den Einsatz eines Brennweitenreduzierers, der die Brennweite der Objektive halbiert.
Video
Interessieren Sie sich für weitere Raspberry Pi-Projekte?
Sie können sich unsere Paragon Projekte Serie ansehen hier.
Was würdest du mit einem Lego-U-Boot und einer Pieca-Kamera machen?