Raspberry Pi-projecten: Moderne oplossingen vereisen modernere oplossingen!
Deze week brengen we je een aantal zeer modern Raspberry Pi-projecten!
Ooit de meme gezien die gaat als "Moderne problemen vragen om moderne oplossingen?".
Wat gebeurt er als je moderne oplossingen moderne problemen creëren?
Dan heb je een moderne oplossing nodig.
Moderne oplossingen vereisen dus moderne oplossingen.
Soms zijn deze problemen echter zo klein dat fabrikanten niet de moeite nemen om een oplossing voor je te maken.
Gelukkig is onze vindingrijkheid als Raspberry Pi-liefhebbers eindeloos.

Motor automatisch starten stop uitschakelen
Het verbruik van brandstof is tegenwoordig erg belangrijk nu de benzineprijzen de pan uit rijzen.
Het is de verdienste van autofabrikanten dat ze een oplossing hebben ontwikkeld die de motor stopt wanneer wordt gedetecteerd dat de auto stationair draait. Dit helpt je auto echt om benzine te besparen als hij stilstaat.
Maar sommige mensen hebben het liever niet aan en ik begrijp waarom.
Een tijdje geleden zat ik in een moderne huurauto. Ik ontdekte dat ik, met het auto-stop-startsysteem ingeschakeld, mijn remdruk moest "plannen" zodat ik de motor kon starten voordat het licht op groen sprong.
Soms vergat ik dat en dan zat ik langer bij een groen blok dan ik zou willen. Ik compenseerde dat door harder op het gas te gaan staan. Niet aan te raden.
Sommige autofabrikanten geven je geen keuze om de automatische stop-startfunctie uit te schakelen. Als je het wilt uitschakelen, moet je elke keer dat je rijdt op de knop drukken.
Nu niet meer!
Overzicht project
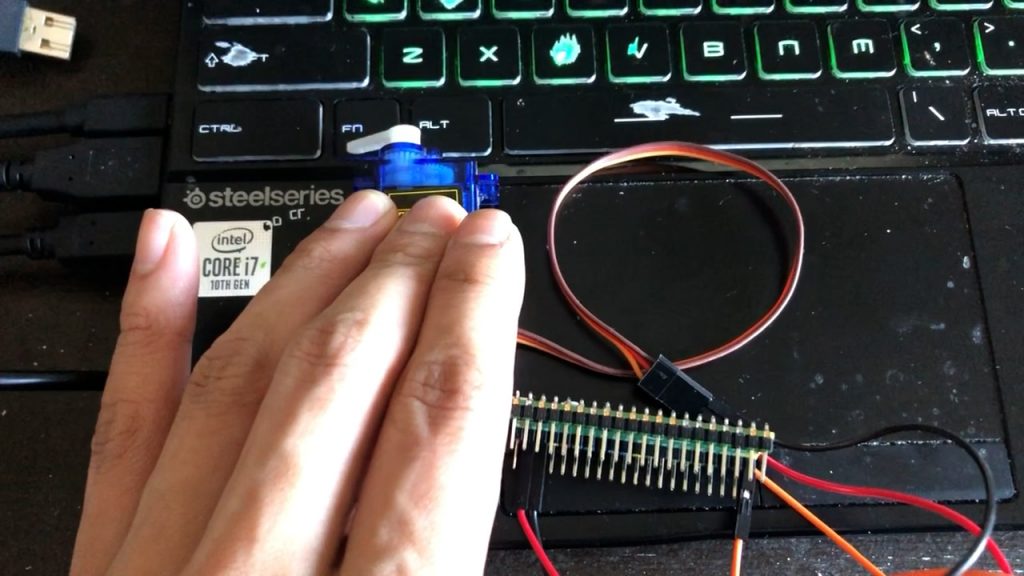
Wat je in de video hierboven ziet is een commercieel product, maar het kan eenvoudig worden gemaakt met een Raspberry Pi Pico en een SG90 servo. De Raspberry Pi Pico kan van stroom worden voorzien via de USB-poorten van de auto.
De basis MicroPython code is dit en gaat ervan uit dat je de signaallijn van de servo in GPIO 16 hebt gestoken.
from time import sleep
from machine import Pin
from machine import PWM
pwm = PWM(Pin(16))
pwm.freq(50)
pwm.duty_ns(2000000)
sleep(0.5)
pwm.duty_ns(500000)
Dit brengt een aantal uitdagingen met zich mee:
Eerst moet je de hoek van de servo aanpassen. Dit wordt aangepast door de waarde die wordt doorgegeven aan pwn_duty_nsin nanoseconden.
2 miljoen nanoseconden (2.000.000) is gelijk aan een volledige rotatie en 500.000 is een volledige rotatie in de tegenovergestelde richting.
Uiteindelijk gebruikte ik slechts 1.000.000 tot 2.000.000 nanoseconden, in plaats van het volledige bereik van de servo.
Ten tweede moet je weten hoe je de start-stopfunctie van je auto uitschakelt. Bij sommige moet je de knop ingedrukt houden, dus moet je de start-stopfunctie aanpassen. slaap lengte.
Ten derde wil je dat dit alleen werkt als de motor aan is, en niet als je de radio start. Dit is waarschijnlijk de grootste uitdaging omdat er geen eenvoudige manier is om de Pico te vertellen wanneer de motor aan is.
Maar hetzelfde project - een servo bedienen met de Raspberry Pi Pico kan eigenlijk heel nuttig zijn voor veel andere projecten, zoals een omschakelaar. Ik gebruik precies deze methode om blijf in bed en doe de slaapkamerverlichting uit.
Of het kan gebruikt worden om een screensaver te stoppen door op een willekeurige knop te drukken (zoals INSERT).
Openmaaier: GPS robotmaaier
"Robotmaaiers zijn waardeloos!"
Dat zegt Clemens Elflein, de maker van OpenMower.
Zijn klacht is dat deze robotmaaiers te dom zijn.
"In principe rijden al deze bots in een willekeurige richting totdat ze de rand van het gazon raken, roteren ze voor een willekeurige duur en herhalen ze. Ik denk dat we beter kunnen!"
Dus in plaats van een willekeurige grasmaaimethode zocht Clemens naar iets preciezers door GPS te integreren. Het voordeel hiervan is dat de robotmaaier ook autonoom naar de achtertuin kan navigeren en daar gras kan maaien!
Een robotmaaier is een moderne oplossing om de repetitieve taak van het grasmaaien te verminderen. Maar het is niet goed genoeg.
Onthoud waarom je dit leest... moderne oplossingen vereisen modernere oplossingen!
Projectdoelen
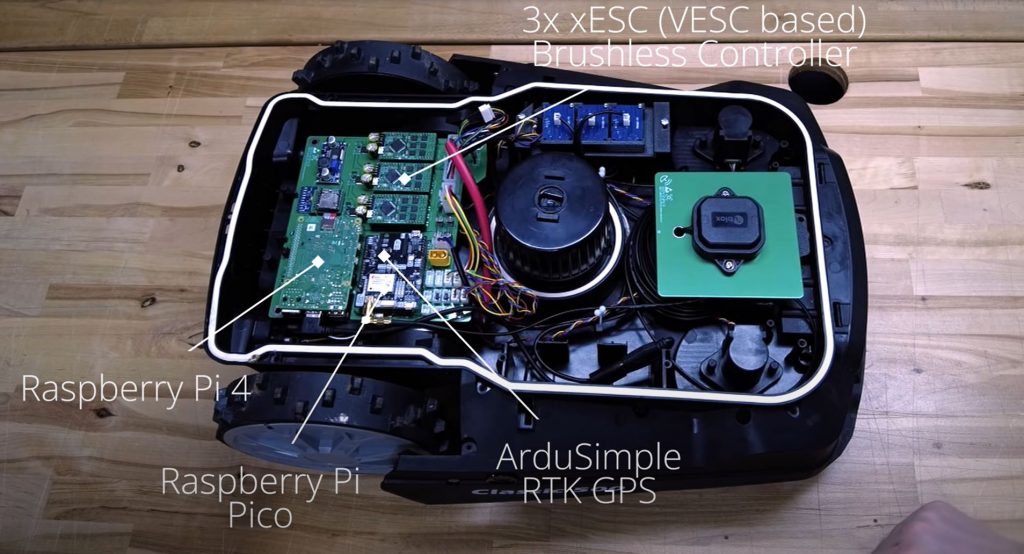
Clemens gebruikte een commercieel product genaamd de YardForce Classic 500 en installeerde een Raspberry Pi 4 en Raspberry Pi Pico.
Zoals vermeld op zijn GithubDit zijn zijn doelen:
Autonoom grasmaaien: Uiteraard moet het apparaat het gazon automatisch kunnen maaien.
- Goede veiligheid: Het apparaat moet veilig zijn, bijvoorbeeld een noodstop bij optillen of neerstorten.
- Geen omtrekdraad nodig: We willen flexibel zijn en meerdere maaigebieden ondersteunen.
- Lage kosten: het moet goedkoper zijn dan een middenklasse kant-en-klaar product
- Open: Ik wil kennis delen en anderen in staat stellen ook een OpenMower te bouwen.
- Mooi om naar te kijken: U hoeft zich er niet voor te schamen dat een OpenMower uw gazon maait.
- Obstakels vermijden: De maaier moet obstakels detecteren en vermijden tijdens het maaien.
- Regendetectie: Het apparaat moet slechte weersomstandigheden kunnen detecteren en het maaien onderbreken tot het beter gaat.
Kun je het doen?
Clemens heeft een Discord-groep aangemaakt en er doen dagelijks mensen mee.
Hij raadt je niet aan om het te doen, tenzij je weet wat je doet.
Hij maakt het heel duidelijk met een disclaimer dat als er iets misgaat, je niet bij hem hoeft aan te kloppen.
Doe mee met OpenMower's Discord of bekijk hun GitHub.
Geen poep, Sherlock: overengineering om van hondenpoep in de tuin af te komen
Caleb Olson heeft een corgi die overal in zijn tuin uitwerpselen achterlaat.
In eerste instantie ontwierp hij een systeem dat aangeeft waar zijn hond, Twinkie, poep laat vallen en dit markeert op een afbeelding. Een moderne oplossing.
Maar de moderne oplossing bleek "veel te veel werk", omdat hij naar zijn telefoon moest grijpen om een idee te krijgen waar de locaties waren.
Dus wat deed hij? Hij installeerde een robotarm met een laser die aanwijst waar de poep ligt.
Moderne oplossingen vereisen modernere oplossingen.
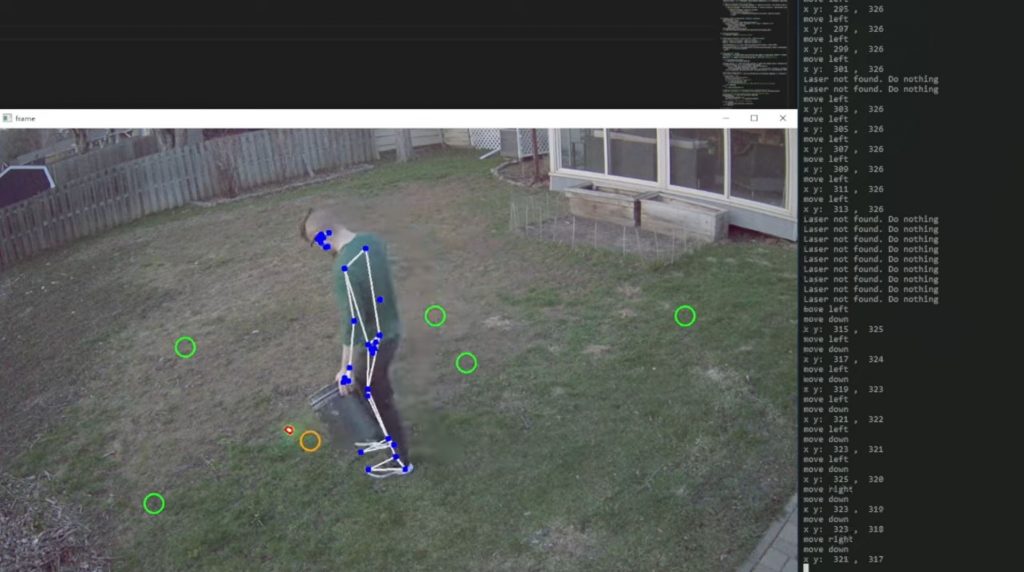

Computer vision is cruciaal voor deze taak omdat het de poeplasergeleiding start. Door zijn armen te kruisen, start de computer het geleidingssysteem door naar de eerste poepplek te wijzen.
Als hij dan bukt om het op te rapen, detecteert OpenCV dat en verplaatst hem naar de volgende poepplek.
Hebben jullie allemaal zo'n... project?
Ik kam Reddit, Twitter en andere websites dagelijks uit om interessante projecten te vinden voor de PiCockpit-nieuwsbrief.
Je kunt ook onze Paragon Projects-serie bekijken hier.
Als je een interessant project kent, laat dan hieronder een reactie achter 👇
Als je deze serie leuk vindt, schrijf je dan hieronder in voor onze nieuwsbrief 👇