Paragon Project: ESP32 Drones!

W zeszłym tygodniu opublikowaliśmy artykuł na temat 10 najlepszych projektów ESP32 w 2023 roku. Cóż, najwyraźniej przeskoczyliśmy broń, ponieważ zaledwie dzień później Joshua Bird podzielił się najfajniejszym projektem ESP32 2023 roku: Drony ESP32, które latają autonomicznie z systemem przechwytywania ruchu!
Co najlepsze, Joshua podzielił się wszystkimi szczegółami projektu i udostępnił go jako open source.

Ten projekt jest dość skomplikowany, ale Joshua sprawia, że wygląda to śmiesznie prosto, co świadczy o niezwykle przemyślanym projekcie.
Hardware
Jeśli chodzi o sprzęt, należy wziąć pod uwagę dwie rzeczy. Pierwszą z nich jest system przechwytywania ruchu. Drugą są same drony.
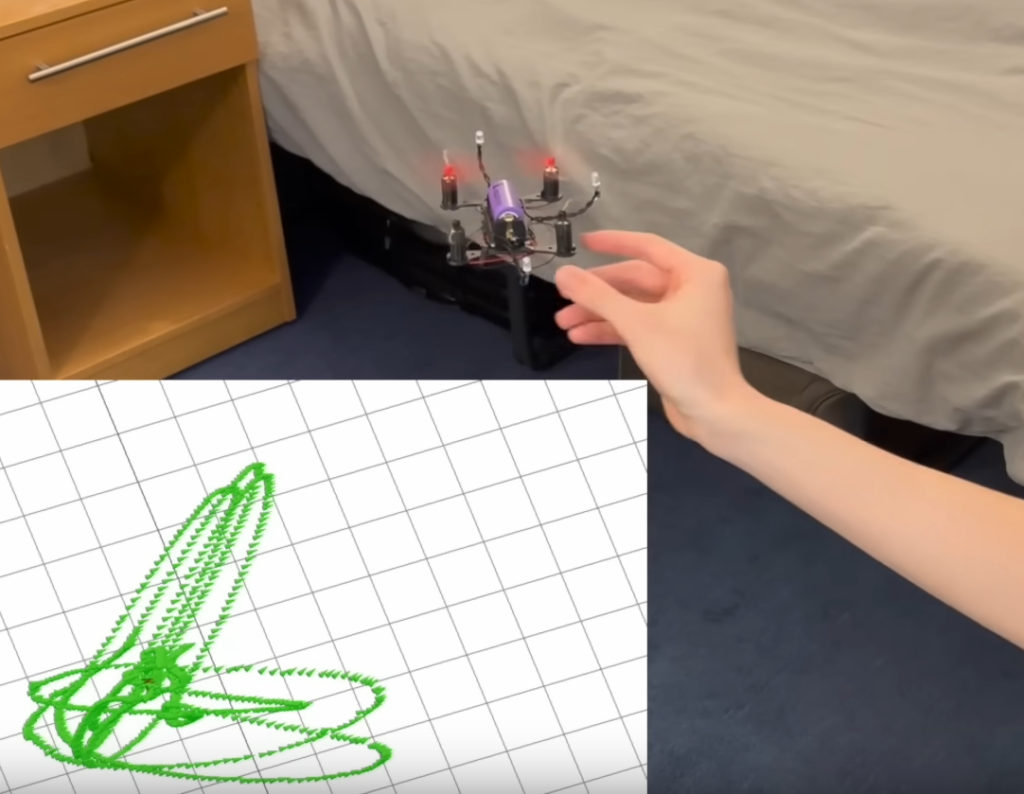
System przechwytywania ruchu opiera się na czterech kamerach śledzących znaczniki podczerwieni. Są one następnie w stanie określić lokalizację dronów i umieścić je z powrotem na miejscu.
Co więcej, system przechwytywania ruchu jest w stanie zlokalizować wiele dronów w tym samym czasie. Tak więc, jak nazywa to Joshua, można stworzyć rój dronów.
Taka konfiguracja umożliwia dronom autonomiczne przemieszczanie się do wybranej lokalizacji.
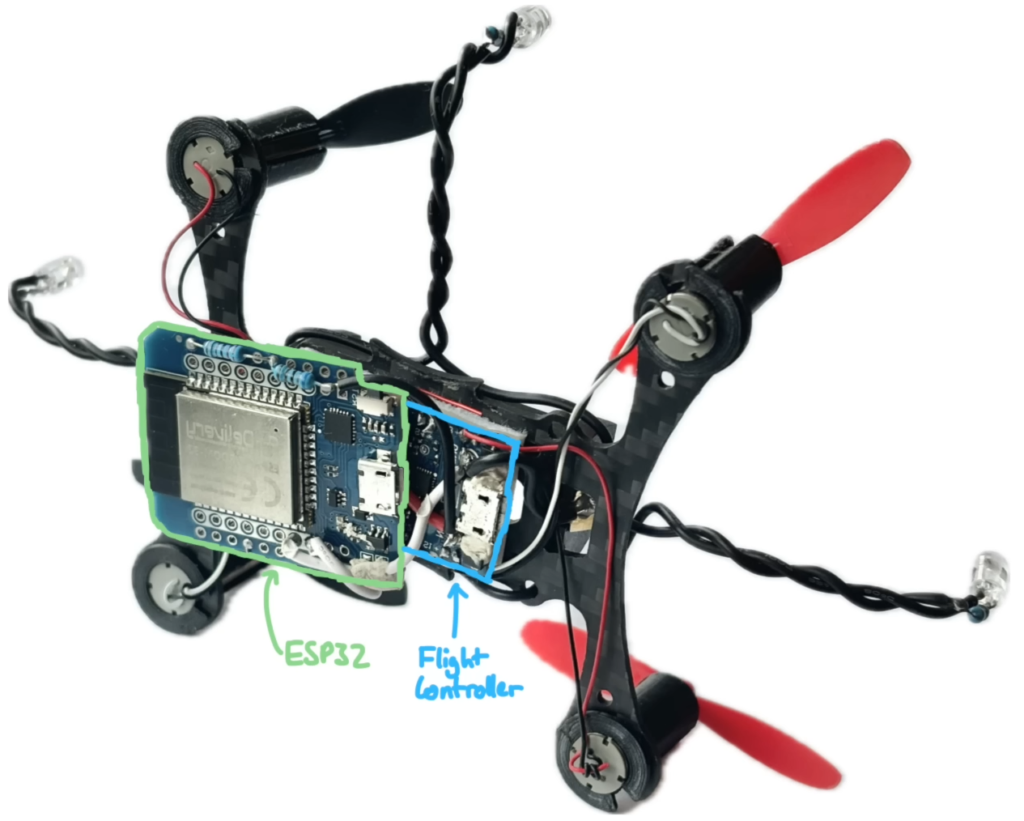
Przejdźmy teraz do dronów, które obracają się głównie wokół ESP32 i F3 EVO Micro Brush Flight Control Board.
Jeśli jesteś zainteresowany samodzielnym złożeniem tego zestawu i chcesz uzyskać pełne zestawienie niezbędnych elementów, to masz szczęście! Joshua był na tyle uprzejmy, że wymienił komponenty i ceny (wraz z linkami) na stronie Strona dyskusji w serwisie GitHub:
| urządzenie | cena | nazwa |
|---|---|---|
| Kontroler lotu | $23 | F3 EVO Micro Brushed Flight Controller z systemem Betaflight |
| Silnik ramy i rekwizyty | $13 | Generyczna rama drona szczotkowego 95 mm, silniki szczotkowe 8520, rekwizyty 55 mm |
| Bateria | $5 | YDL 18350 (1100mah, 9A) |
| Uchwyt baterii | $0.5 | Uchwyt na akumulator 1S 18350 |
| Znaczniki podczerwieni | $0.1 | 3 mm diody IR Led (należy przeszlifować powierzchnię, aby emitowały światło równomiernie, a nie tylko w górę) |
| Odbiornik ESP32 | $4 | WEMOS D1 Mini ESP32 USB-C |
Jak widać, można to skonfigurować bez rozbijania banku!
Co więcej, Joshua uwzględnił również pliki .stl na GitHub, jeśli chcesz samodzielnie wydrukować części drona w 3D. Dzięki temu możesz błyskawicznie stworzyć własny rój dronów.
Prawdopodobnie najtrudniejszą rzeczą, jeśli chcesz zaoszczędzić pieniądze, będzie skonfigurowanie kamer dla systemu przechwytywania ruchu. Joshua użył PlayStation Eye kamery. Ale chociaż są tanie, będziesz musiał wymienić filtr odcinający podczerwień na filtr podczerwieni.
W końcu chodzi o to, że wychwytują one światło podczerwone.
I tutaj błyszczy czysta pomysłowość, ponieważ Joshua pociął pasek podczerwieni na dyskietce, aby zbudować filtr podczerwieni.
Oprogramowanie
Joshua napisał backend w Pythonie. Skrypty Pythona działają z OpenCV, SciPy Optimizer i NumPy w celu określenia lokalizacji kamer i triangulacji pozycji dronów.
Backend komunikuje się bezpośrednio z kamerami, a także z ESP32 na ścianie, który działa jako nadajnik-odbiornik z ESP32 na każdym dronie za pośrednictwem protokołu ESP-NOW.
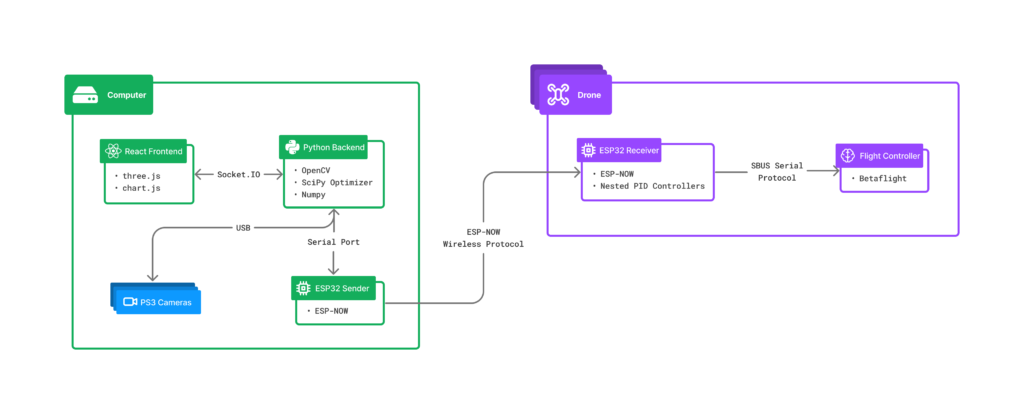
Backend komunikuje się również z frontendem, który Joshua napisał w React, aby mieć łatwy interfejs sieciowy do kontrolowania wszystkiego.
Wniosek
Kreatywność włożona w ten projekt mówi sama za siebie. Jak ktoś napisał do Joshuy na Reddit"Będziemy obserwować twoją karierę z największym zainteresowaniem". Jestem pewien, że mówię w imieniu wszystkich, gdy mówię, że nie mogę się doczekać, aby zobaczyć, co Joshua podzieli się dalej!
Koniecznie obejrzyj wideo, w którym Joshua opowiada o szczegółach:
Możesz również udać się na stronę strona GitHub. Zawiera cały kod i pliki .stl, a także kilka informacji o tym, jak można to skonfigurować samodzielnie.
Jeśli chcesz zobaczyć wszystkie nasze projekty Paragon, możesz kliknąć przycisk poniżej, aby je zobaczyć!
A jeśli jeszcze tego nie zrobiłeś, zapisz się do naszego newslettera. Udostępniamy w nim wiele fajnych projektów, które prezentujemy w tej serii.
Co byś zrobił ze swoimi rojami dronów ESP32?