Projekty Raspberry Pi: Nowoczesne rozwiązania wymagają bardziej nowoczesnych rozwiązań!
W tym tygodniu przedstawiamy kilka bardzo nowoczesny Projekty Raspberry Pi!
Widziałeś kiedyś mema, który brzmi: "Nowoczesne problemy wymagają nowoczesnych rozwiązań"?
Cóż, co się stanie, jeśli nowoczesne rozwiązania stworzą nowoczesne problemy?
W takim razie potrzebujesz nowoczesnego rozwiązania.
Dlatego nowoczesne rozwiązania wymagają nowoczesnych rozwiązań.
Czasami jednak problemy te są tak drobne, że producenci nie zawracają sobie głowy tworzeniem rozwiązania dla użytkownika.
Na szczęście, jako entuzjaści Raspberry Pi, nasza pomysłowość jest nieograniczona.

Wyłączanie automatycznego uruchamiania i zatrzymywania silnika
Przebieg na gazie jest bardzo ważny w dzisiejszych czasach, gdy ceny paliwa idą w górę.
Producenci samochodów stworzyli rozwiązanie, które zatrzymuje silnik, gdy wykryje, że samochód pracuje na biegu jałowym. To naprawdę pomaga samochodowi oszczędzać benzynę podczas postoju.
Ale niektórzy wolą go nie mieć i rozumiem dlaczego.
Jakiś czas temu jechałem nowoczesnym samochodem z wypożyczalni. Okazało się, że przy włączonym systemie auto-stop-start musiałem "zaplanować" ciśnienie w układzie hamulcowym, aby uruchomić silnik przed zmianą światła na zielone.
Czasami zapominałem się i siedziałem na zielonym dłużej niż bym chciał. Rekompensowałem to sobie mocniejszym wciskaniem gazu. Niezalecane.
Niektórzy producenci samochodów nie dają możliwości wyłączenia funkcji automatycznego stop-start. Jeśli chcesz ją wyłączyć, musisz naciskać przycisk za każdym razem, gdy prowadzisz samochód.
Już nie!
Zarys projektu
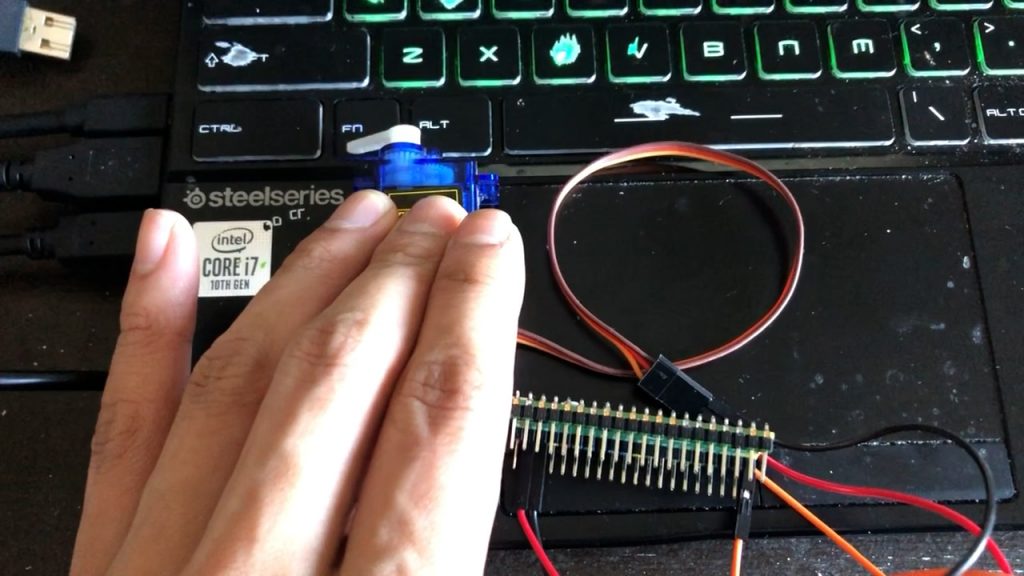
To, co widać na powyższym filmie, jest produktem komercyjnym, ale można to łatwo osiągnąć za pomocą Raspberry Pi Pico i serwomechanizmu SG90. Zasilanie Raspberry Pi Pico może być dostarczane przez porty USB samochodu.
Podstawowy kod MicroPython jest następujący i zakłada, że linia sygnałowa serwomechanizmu została podłączona do GPIO 16.
from time import sleep
from machine import Pin
from machine import PWM
pwm = PWM(Pin(16))
pwm.freq(50)
pwm.duty_ns(2000000)
sleep(0.5)
pwm.duty_ns(500000)
Wiąże się z tym kilka wyzwań:
Najpierw należy wyregulować kąt serwomechanizmu. Jest on regulowany przez wartość przekazywaną do pwn_duty_nsktóra jest wyrażona w nanosekundach.
2 miliony nanosekund (2 000 000) równa się pełnemu obrotowi, a 500 000 to pełny obrót w przeciwnym kierunku.
Ostatecznie użyłem tylko od 1 000 000 do 2 000 000 nanosekund, zamiast pełnego zakresu serwomechanizmu.
Po drugie, musisz wiedzieć, jak dezaktywować funkcję start-stop w samochodzie. Niektóre z nich wymagają naciśnięcia i przytrzymania, a zatem konieczne będzie ustawienie sen długość.
Po trzecie, ma to działać tylko wtedy, gdy silnik jest włączony, a nie po uruchomieniu radia. Jest to prawdopodobnie największe wyzwanie, ponieważ nie ma łatwego sposobu, aby powiedzieć Pico, kiedy silnik jest włączony.
Ale ten sam projekt - obsługa serwomechanizmu za pomocą Raspberry Pi Pico może być bardzo korzystna dla wielu innych projektów, takich jak przełączanie przełączników. Używam dokładnie tej metody do pozostać w łóżku i wyłączyć światła w sypialni.
Można go też użyć do zatrzymania wygaszacza ekranu poprzez naciśnięcie losowego przycisku (np. INSERT).
OpenMower: Zrobotyzowana kosiarka GPS
"Zrobotyzowane kosiarki są do bani!"
Tak twierdzi Clemens Elflein, twórca OpenMower.
Narzeka, że te kosiarki są zbyt głupie.
"Zasadniczo wszystkie te boty jadą w losowym kierunku, aż uderzą w granicę trawnika, obracają się przez losowy czas i powtarzają. Myślę, że stać nas na więcej!"
Tak więc, zamiast losowej metody koszenia trawy, Clemens szukał czegoś bardziej precyzyjnego, integrując GPS. Zaletą jest to, że kosiarka może również autonomicznie nawigować do podwórka i kosić tam trawę!
Kosiarka automatyczna to nowoczesne rozwiązanie pozwalające ograniczyć powtarzalne czynności związane z koszeniem trawnika. Ale to nie wystarczy.
Pamiętaj, dlaczego to czytasz... nowoczesne rozwiązania wymagają bardziej nowoczesnych rozwiązań!
Cele projektu
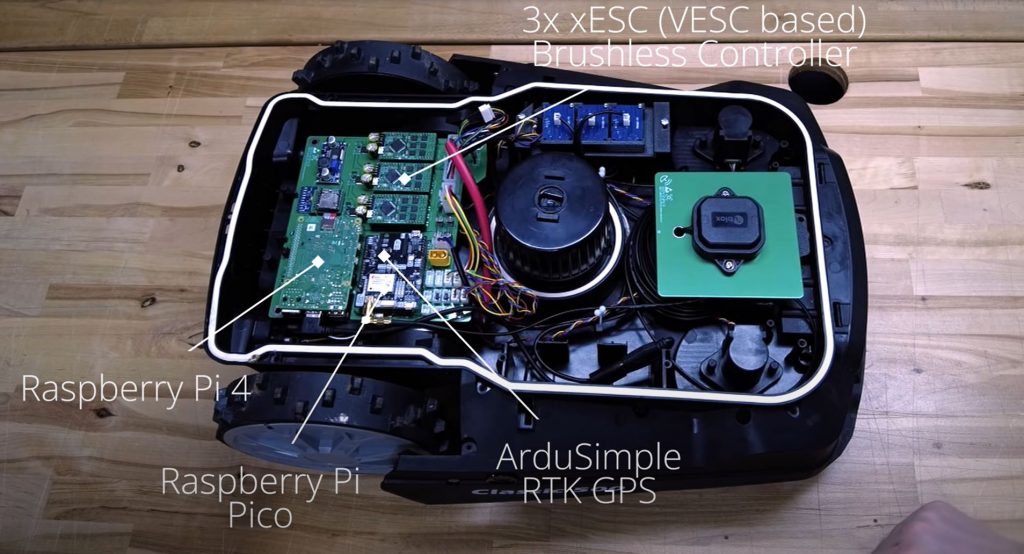
Clemens wykorzystał komercyjny produkt o nazwie YardForce Classic 500 i zainstalował Raspberry Pi 4 oraz Raspberry Pi Pico.
Jak stwierdzono na jego GithubTo są jego cele:
Autonomiczne koszenie trawnika: Oczywiście urządzenie powinno być w stanie automatycznie kosić trawnik.
- Dobre bezpieczeństwo: Urządzenie musi być bezpieczne, np. wyłącznik awaryjny w przypadku podniesienia lub zderzenia.
- Nie jest potrzebny przewód obwodowy: Chcemy być elastyczni i obsługiwać wiele obszarów koszenia.
- Niski koszt: Powinien być tańszy niż gotowy produkt średniej klasy.
- Open: Chcę dzielić się wiedzą i umożliwić innym zbudowanie kosiarki OpenMower.
- Przyjemny dla oka: Nie powinieneś się wstydzić, że kosiarka OpenMower kosi Twój trawnik.
- Unikanie przeszkód: Kosiarka powinna wykrywać przeszkody i omijać je podczas koszenia.
- Wykrywanie deszczu: Urządzenie powinno być w stanie wykryć złe warunki pogodowe i wstrzymać koszenie do czasu ich poprawy.
Możesz to zrobić?
Clemens utworzył grupę Discord, w której codziennie uczestniczą ludzie.
Nie zaleca tego robić, jeśli nie wie się, co się robi.
Daje do zrozumienia, że jeśli coś pójdzie nie tak, nie należy pukać do jego drzwi.
Dołącz do OpenMower Discord lub zobaczyć ich GitHub.
Bez kupy, Sherlocku: jak pozbyć się psiej kupy z podwórka?
Caleb Olson ma corgi, który zostawia odchody na całym podwórku.
Początkowo zaprojektował system, który zaznacza, gdzie jego pies, Twinkie, upuszcza kupę i zaznacza to na obrazie. Nowoczesne rozwiązanie.
Nowoczesne rozwiązanie okazało się jednak "zbyt pracochłonne", ponieważ musiał sięgać do telefonu, aby zorientować się, gdzie znajdują się lokalizacje.
Co więc zrobił? Zainstalował ramię robota z laserem, który wskazuje, gdzie znajduje się kupa.
Nowoczesne rozwiązania wymagają bardziej nowoczesnych rozwiązań.
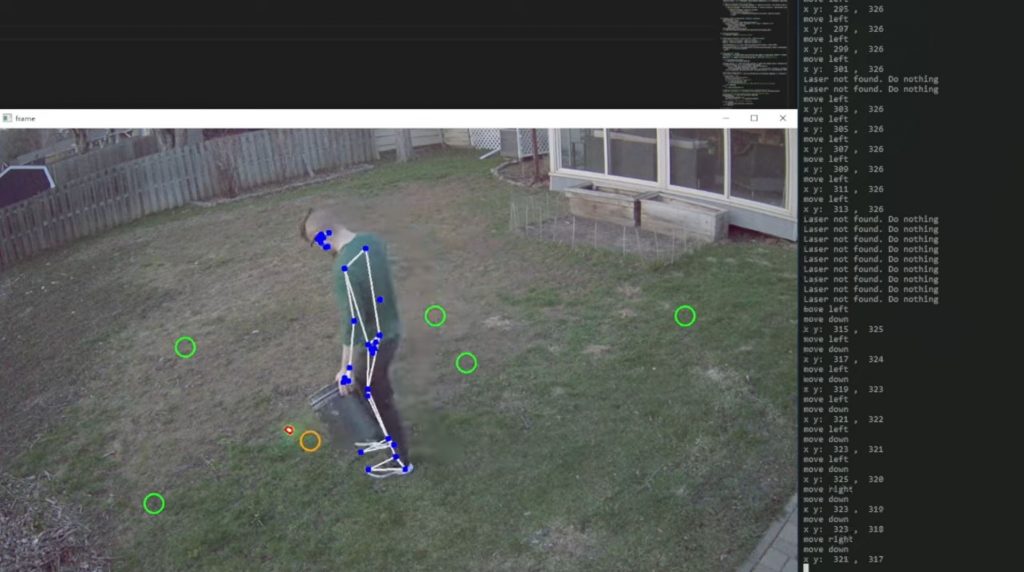

Wizja komputerowa ma kluczowe znaczenie dla tego zadania, ponieważ uruchamia laserowe naprowadzanie na kupę. Krzyżując ramiona, komputer uruchamia system naprowadzania, wskazując pierwsze miejsce kupy.
Następnie, gdy pochyla się, aby go podnieść, OpenCV wykrywa to i przenosi go do następnego miejsca kupy.
Macie któryś z tych... projektów?
Codziennie przeczesuję Reddita, Twittera i inne strony internetowe w poszukiwaniu interesujących projektów do zaprezentowania w biuletynie PiCockpit.
Możesz również sprawdzić naszą serię Paragon Projects tutaj.
Jeśli znasz jakiś ciekawy projekt, zostaw komentarz poniżej 👇
Jeśli podoba Ci się ta seria, zapisz się do naszego newslettera poniżej 👇