Paragon Project: ESP32 Drones!

Vorige week publiceerden we een artikel over de 10 beste ESP32-projecten van 2023. Nou, we zijn duidelijk te hard van stapel gelopen, want slechts een dag later deelde Joshua Bird het coolste ESP32-project van 2023: ESP32 drones die autonoom vliegen met een motion capture systeem!
Het beste van alles is dat Joshua alle details van het project heeft gedeeld en het open source heeft gemaakt.

Dit project is behoorlijk ingewikkeld, maar Joshua laat het er belachelijk eenvoudig uitzien, wat getuigt van een zeer doordacht project.
Hardware
Als het op hardware aankomt, zijn er twee dingen waar je rekening mee moet houden. Ten eerste het motion capture systeem. Ten tweede zijn er de drones zelf.
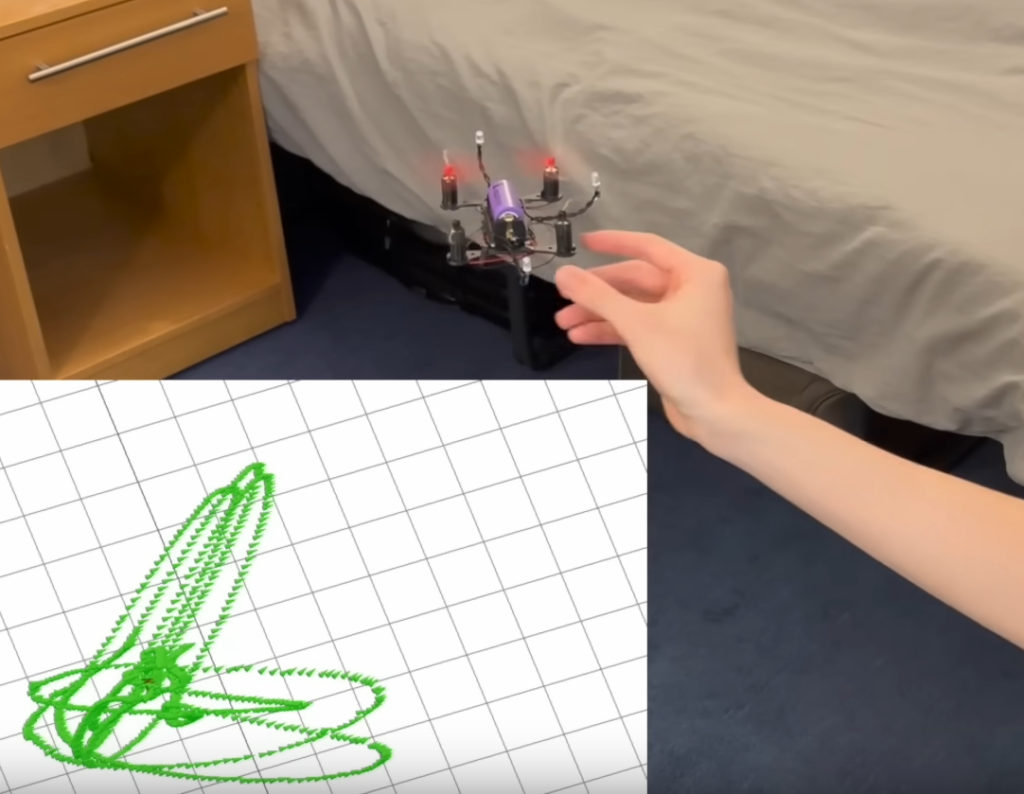
Het bewegingsopnamesysteem maakt gebruik van vier camera's om infrarode markers te volgen. Deze kunnen vervolgens de locatie van de drones bepalen en ze terug op hun plaats zetten.
Wat extra cool is, is dat het motion capture systeem in staat is om meerdere drones tegelijk te lokaliseren. Dus, zoals Joshua het noemt, je kunt een dronezwerm maken.
Deze opstelling maakt het mogelijk voor de drones om autonoom naar een gekozen locatie te bewegen.
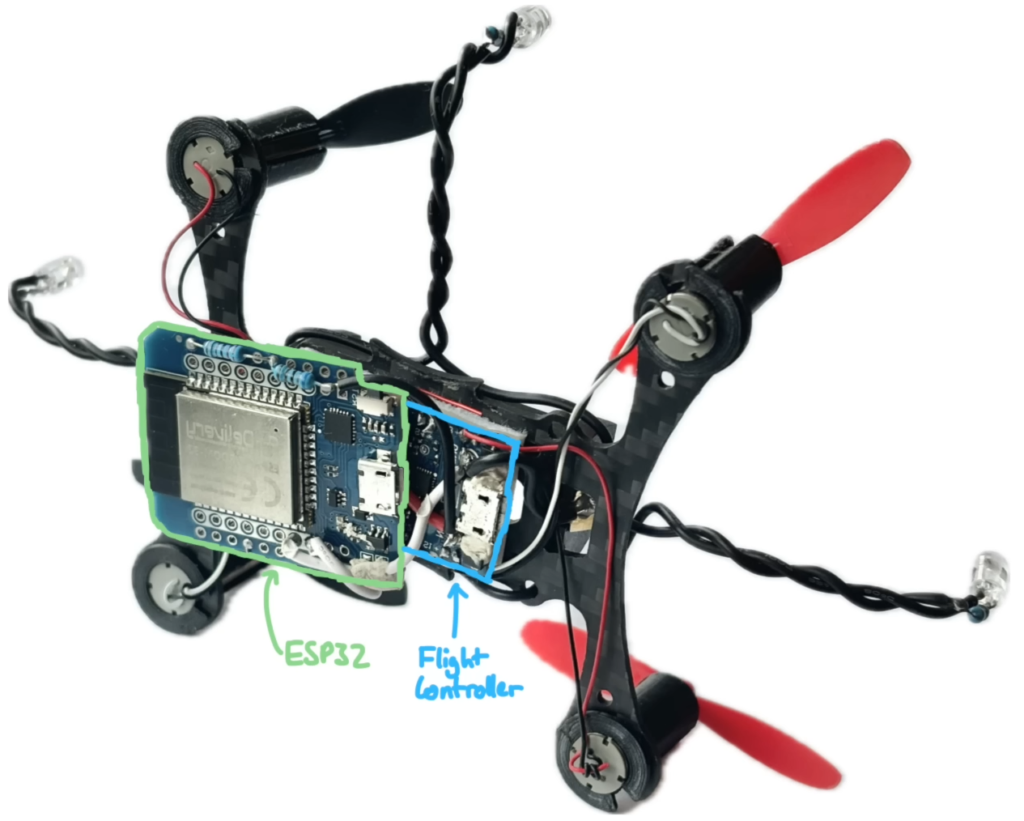
Laten we nu naar de drones gaan, die voornamelijk draaien om een ESP32 en een F3 EVO Micro Brush Flight Control Board.
Als je dit zelf wilt maken en een volledig overzicht wilt van de benodigde onderdelen, dan heb je geluk! Joshua is zo vriendelijk geweest om de onderdelen en de prijzen (met links) op te sommen op de GitHub discussiepagina:
| apparaat | prijs | naam |
|---|---|---|
| Vluchtregelaar | $23 | F3 EVO Micro Geborstelde Vluchtregelaar met Betaflight |
| Frame Motor & rekwisieten | $13 | Generiek 95mm geborsteld drone frame, 8520 geborstelde motoren, 55mm props |
| Batterij | $5 | YDL 18350 (1100mah, 9A) |
| Batterijhouder | $0.5 | 1S 18350 batterijhouder |
| IR-markeringen | $0.1 | 3mm IR Led (je moet het oppervlak opschuren zodat ze gelijkmatig licht uitstralen, in plaats van alleen omhoog) |
| ESP32-ontvanger | $4 | WEMOS D1 Mini ESP32 USB-C |
Zoals je kunt zien, kun je dit opzetten zonder de bank te breken!
Meer nog, Joshua heeft ook de .stl-bestanden op GitHub, als je de drone-onderdelen zelf wilt 3D-printen. Zo kun je in een mum van tijd je eigen dronezwerm maken.
Het moeilijkste, als je geld wilt besparen, is waarschijnlijk het instellen van de camera's voor het motion capture-systeem. Joshua gebruikte PlayStation-oog camera's. Maar hoewel ze goedkoop zijn, moet je het IR-afsnijfilter vervangen door een IR-filter.
Het hele punt is immers dat ze infrarood licht opvangen.
En hier schittert pure vindingrijkheid, want Joshua knipte de infraroodstrip op een diskette om het IR-filter te bouwen.
Software
Joshua heeft de backend in Python geschreven. De Python-scripts draaien met OpenCV, SciPy Optimizer en NumPy om de locatie van de camera's te bepalen en de positie van de drones te trianguleren.
De backend communiceert rechtstreeks met de camera's en ook met een ESP32 op de muur, die als zender-ontvanger werkt met de ESP32 op elke drone via het ESP-NOW protocol.
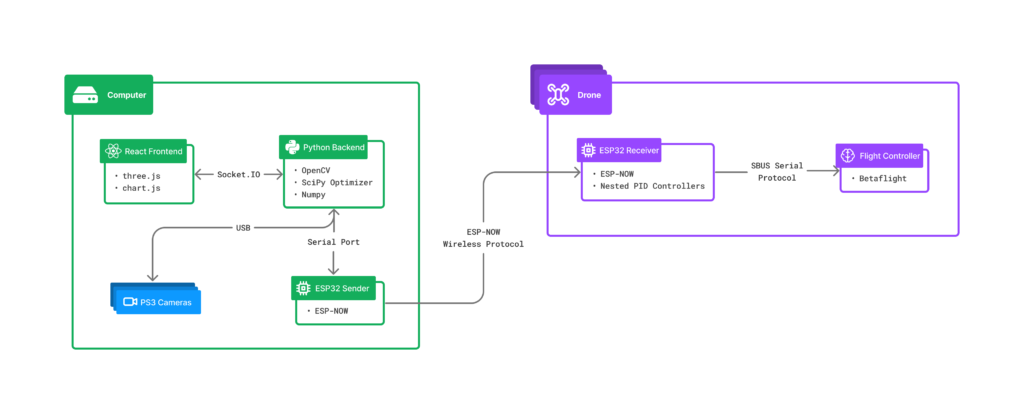
De backend communiceert ook met een frontend die Joshua in React heeft geschreven om een eenvoudige webinterface te hebben om alles te besturen.
Conclusie
De creativiteit die in dit project is gestoken spreekt voor zich. Zoals iemand aan Joshua schreef op Reddit"We zullen je carrière met de grootste belangstelling volgen". Ik weet zeker dat ik voor iedereen spreek als ik zeg dat ik niet kan wachten om te zien wat Joshua hierna gaat delen!
Bekijk zeker de video, waarin Joshua in detail treedt:
Je kunt ook naar de GitHub-pagina. Het bevat alle code en de .stl-bestanden, evenals informatie over hoe je dit zelf kunt instellen.
Als je al onze Paragon Projecten wilt zien, kun je op de knop hieronder klikken om ze te bekijken!
En als je dat nog niet hebt gedaan, schrijf je dan in voor onze nieuwsbrief. We delen veel van de coole projecten die we in deze serie laten zien.
Wat zou jij doen met je ESP32 dronezwerm?