Łódź podwodna i kamera Lego: Projekty Raspberry Pi
O rany, o rany, mamy w tym tygodniu kilka interesujących projektów Raspberry Pi.
Pierwszy projekt to sterowana radiowo łódź podwodna, która może tonąć, wynurzać się, obracać i poruszać. Sercem łodzi podwodnej jest Raspberry Pi Zero 2.
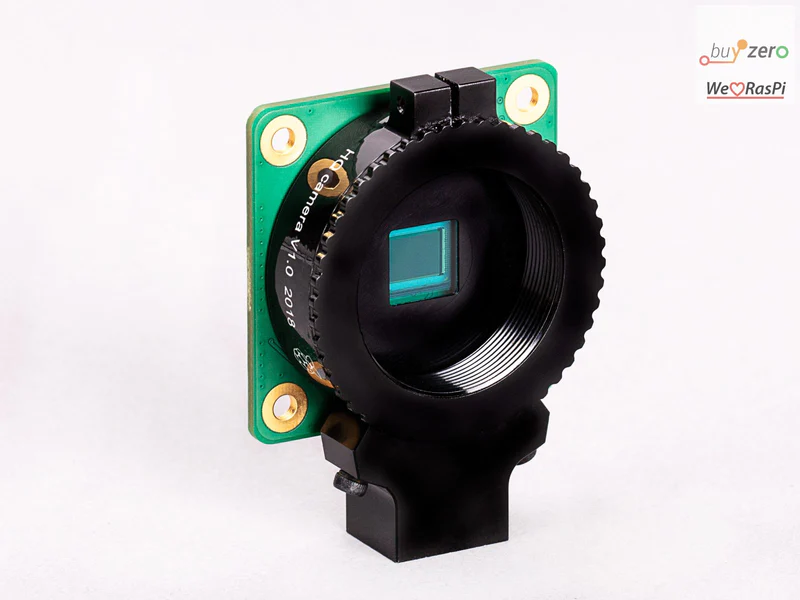
Drugi projekt to kamera "Pieca", nazwana na cześć aparatu Leica. Kluczowym podobieństwem między Pieca i Leica jest użycie wymiennego obiektywu z mocowaniem M, który jest następnie parowany z Raspberry Pi 4 i modułem czujnika obrazu wysokiej jakości
Raspberry Pi Zero + łódź podwodna Lego Technic
Czwarty raz to urok dla Kanał eksperymentu z cegłami (BEC), który stworzył ten projekt przy użyciu części Lego Technic i Raspberry Pi Zero 2.
Największym wyzwaniem, przed którym stanął BEC, było utrzymanie łodzi podwodnych na pożądanej głębokości, ale w czwartym projekcie zdecydował się użyć strzykawki. Poprzednie trzy nie powiodły się, ponieważ,
"Niestała głębokość była utrapieniem w przypadku trzech okrętów podwodnych, które stworzyłem wcześniej, zwłaszcza okrętów nr 1 i 3. Te okręty zawsze były albo na dnie, albo na powierzchni. Dobre wyzwanie do pokonania".
Jak BEC integruje Raspberry Pi z łodzią podwodną
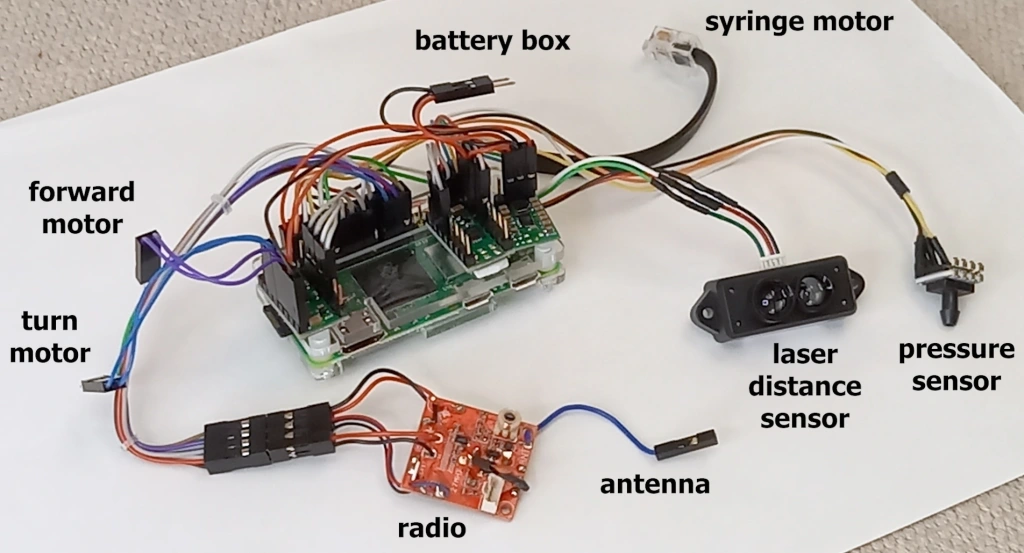
Głównym celem Raspberry Pi Zero 2 firmy BEC jest kontrolowanie głębokości łodzi podwodnej.
BEC początkowo chciał użyć Raspberry Pi Pico, ale ograniczona pamięć flash Pico wynosząca 2 MB była zbyt mała dla jego potrzeb w zakresie rejestrowania danych.
Zbieranie danych o ciśnieniu za pomocą czujnika ciśnienia

BEC wykorzystał czujnik ciśnienia absolutnego w łodzi podwodnej.
BEC początkowo korzystał z czujnika ciśnienia względnego, ale dane nie były wiarygodne, więc zmienił czujnik na Honeywell SSCMANV030PA2A3, który jest czujnikiem ciśnienia bezwzględnego.
Czujnik ciśnienia informuje, na jakiej głębokości znajduje się łódź podwodna.
Alternatywny sposób pomiaru głębokości: laserowy czujnik odległości

BEC zintegrował laserowy czujnik odległości Sparkfun TFMini-S Micro, próbując znaleźć inny sposób pomiaru głębokości poprzez pomiar odległości od dna.
Niestety, laserowe pomiary głębokości nie są zbyt wiarygodne w mulistych wodach. BEC powiedział, że "dane są bardzo niejednolite i nie nadają się do kontroli", więc BEC nie korzystał zbyt często z laserowego czujnika odległości.
Jak określana jest głębokość

Dane z czujników głębokości są następnie wykorzystywane do sterowania strzykawką.
Strzykawka jest podłączona do silnika Lego Technic, który zapamiętuje stopień wciśnięcia lub wysunięcia strzykawki.
Dzięki danym z czujnika ciśnienia i/lub laserowego czujnika odległości, BEC napisał program, który oblicza pozycję strzykawki, pobiera dane o głębokości, oblicza wyjście sterowania PID, a następnie napędza silnik strzykawki do docelowej głębokości.
W ten sposób BEC zbudował swoją łódź podwodną Raspberry Pi + Lego. Możesz przeczytać 10-częściowy wpis na blogu tutaj.
Pieca Camera

Tom Schucker zbudował swojego Pieca przy użyciu Raspberry Pi 4, Raspberry Pi High Quality Camera, 5-calowego wyświetlacza podłączonego przez port DSI i obudowy wydrukowanej w 3D. Cały system jest zasilany przez system baterii PiSugar.
To idealny projekt Raspberry Pi do robienia zdjęć nowej łodzi podwodnej Lego!
Kamera posiada również inne ciekawe funkcje, takie jak moduł GPS, wskaźnik żywotności baterii i napęd USB ułatwiający przesyłanie plików.

Korzystanie z dowolnego obiektywu dalmierzowego z mocowaniem M
Najlepszą częścią tego projektu jest możliwość korzystania z dowolnego obiektywu dalmierzowego M39.
W ciągu ostatniego stulecia wyprodukowano wiele takich obiektywów. Bardzo tanio można kupić obiektywy produkcji rosyjskiej, a także niemieckiej.
Obiektywy te zostały stworzone w erze aparatów manualnych bez autofokusa i automatycznej przysłony. Tak więc, trzeba było ustawić przysłonę i ostrość na obiektywie, tak jak w przypadku starego dalmierza.
Wszystkie obrazy są powiększone
Użycie obiektywu przeznaczonego do formatu 35 mm na mniejszej matrycy oznaczałoby, że wszystkie obrazy są z natury powiększone.
Pomyśl o tym w ten sposób: obiektywy mają wyświetlać obraz 35 mm x 24 mm. Czujnik może jednak przechwycić tylko 6 mm x 4,5 mm z tego obrazu 35 mm x 24 mm. Oznacza to, że wszystkie zdjęcia są przycięte (i dlatego wyglądają jak powiększone).
Tom zrekompensował to za pomocą reduktora ogniskowej, który zmniejsza o połowę ogniskową obiektywów.
Wideo
Interesuje Cię więcej projektów Raspberry Pi?
Możesz sprawdzić naszą serię Paragon Projects tutaj.
Co byś zrobił z łodzią podwodną lego i kamerą pieca?