Lego ubåt och kamera: Projekt med Raspberry Pi
Oj, oj, oj, oj, oj, oj, oj! Vi har några intressanta Raspberry Pi-projekt den här veckan.
Det första projektet är en radiostyrd ubåt som kan sjunka, komma upp till ytan, vända och röra sig. I hjärtat av ubåten finns en Raspberry Pi Zero 2.
Det andra projektet är en "Pieca"-kamera, uppkallad efter en Leica-kamera. Den viktigaste likheten mellan Pieca och en Leica är användningen av ett utbytbart objektiv med M-fäste, som sedan kopplas ihop med Raspberry Pi 4 och bildsensormodulen High-Quality
Raspberry Pi Zero + Lego Technic ubåt
Fjärde gången gillt för Brick Experiment Channel (BEC), som skapade detta projekt med hjälp av Lego Technic-delar och en Raspberry Pi Zero 2.
Den största utmaningen för BEC var att hålla ubåtarna på det djup han ville, men för det fjärde projektet bestämde han sig för att använda en spruta. De tre tidigare misslyckades på grund av,
"Ostadigt djup hade varit ett bekymmer med de tre ubåtar jag gjorde tidigare, särskilt med ubåtarna 1 och 3. De ubåtarna var alltid antingen på botten eller vid ytan. En bra utmaning att övervinna."
Hur BEC integrerar Raspberry Pi i ubåten
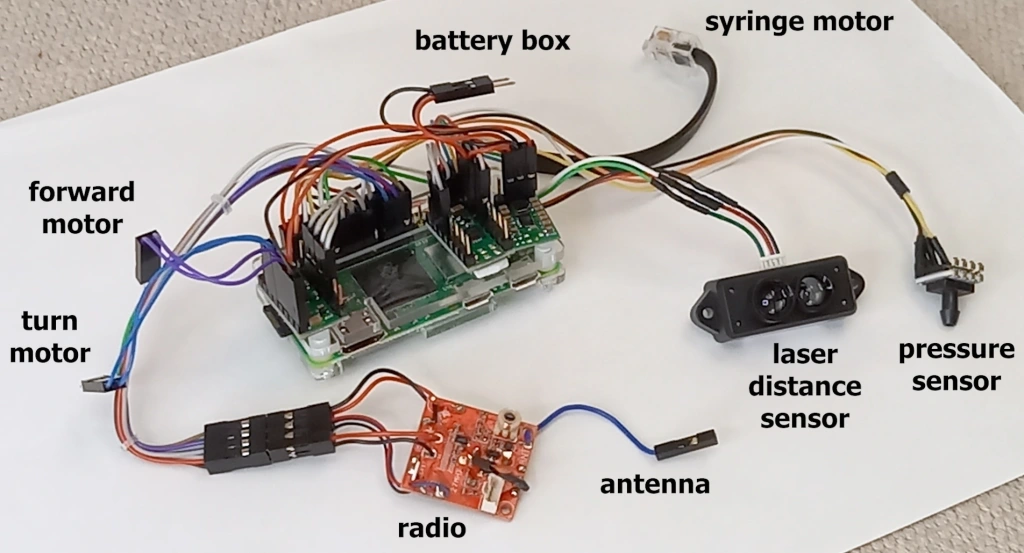
Huvudsyftet med BEC:s Raspberry Pi Zero 2 är att kontrollera ubåtens djup.
BEC ville ursprungligen använda en Raspberry Pi Pico, men Picos begränsade flashminne på 2 MB var för lite för hans dataloggningsbehov.
Insamling av tryckdata med en trycksensor

BEC använde en absolut tryckgivare i ubåten.
BEC använde ursprungligen en relativtryckssensor, men data var inte tillförlitliga och därför bytte han till en Honeywell SSCMANV030PA2A3, som är en absoluttryckssensor.
Tryckgivaren visar hur djupt ubåten är.
Alternativt sätt att mäta djup: laseravståndssensor

BEC integrerade en Sparkfun TFMini-S Micro laseravståndssensor i ett försök att hitta ett annat sätt att mäta djup genom att mäta avståndet från botten.
Tyvärr är laserdjupmätningar inte särskilt tillförlitliga i leriga vatten. BEC säger att "data är mycket ojämna och inte riktigt användbara för kontroll", så BEC använde inte laseravståndssensorn särskilt mycket.
Hur djupet bestäms

Data från djupgivarna används sedan för att driva sprutan.
Sprutan är kopplad till en Lego Technic-motor som lagrar hur långt inskjuten eller tillbakadragen sprutan är.
Med data från trycksensorn och/eller laseravståndssensorn skrev BEC ett program som beräknar sprutans position, hämtar djupdata, beräknar PID-styrningen och sedan driver sprutmotorn till önskat djup.
Och det var så BEC byggde sin Raspberry Pi + Lego-ubåt. Du kan läsa blogginlägget i 10 delar här.
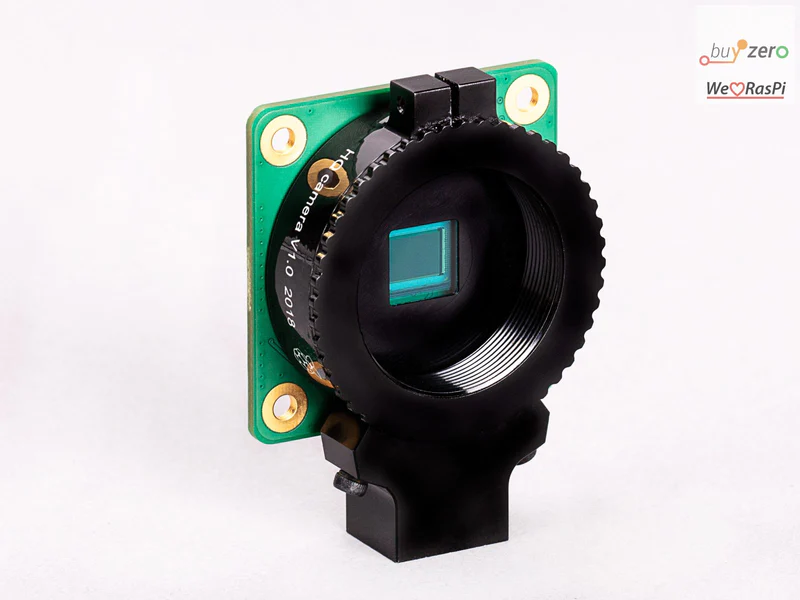
Pieca kamera

Tom Schucker byggde sin Pieca med hjälp av en Raspberry Pi 4, Raspberry Pi High Quality Camera, en 5″ skärm som ansluts via DSI-porten och ett 3D-printat fodral. Hela systemet drivs av PiSugars batterisystem.
Det är det perfekta Raspberry Pi projektet för att nu ta bilder av din nya coola Lego-ubåt!
Kameran har också andra spännande funktioner som en GPS-modul, en batteritidsmätare och ett USB-minne för enkel överföring av filer.

Använd alla M-monterade mätsökarobjektiv
Det bästa med det här projektet är möjligheten att använda alla M39-mätarobjektiv.
Under det senaste århundradet har många av dessa objektiv tillverkats. Du kan köpa rysktillverkade linser mycket billigt och du kan också köpa tysktillverkade.
De här objektiven skapades i en tid med manuella kameror utan autofokus eller automatisk bländaröppning. Så du måste ställa in bländaren och fokusera på objektivet, precis som du skulle göra med en gammal mätsökare.
Alla bilder är inzoomade
Om du använder ett objektiv avsett för 35 mm-format på en mindre sensor innebär det att alla bilder blir inzoomade.
Tänk på det så här: objektiven är avsedda att projicera en bild på 35 mm x 24 mm. Sensorn kan dock bara fånga 6 mm x 4,5 mm av den 35 mm x 24 mm-bilden. Det betyder att alla bilder är beskurna (och därför ser ut som om de är inzoomade).
Tom kompenserade genom att använda en fokalreducerare som halverar brännvidden på objektiven.
Video
Är du intresserad av fler Raspberry Pi projekt?
Du kan kolla in vår Paragon Projects-serie här.
Vad skulle du göra med en lego-ubåt och en pieca-kamera?