Raspberry Pi-Projekte: Moderne Lösungen erfordern modernere Lösungen!
Diese Woche bringen wir Ihnen einige sehr modern Raspberry Pi-Projekte!
Kennen Sie den Spruch "Moderne Probleme erfordern moderne Lösungen"?
Was passiert aber, wenn Ihre modernen Lösungen moderne Probleme schaffen?
Nun, dann brauchen Sie eine moderne Lösung.
Moderne Lösungen erfordern daher moderne Lösungen.
Manchmal sind diese Probleme jedoch so geringfügig, dass sich die Hersteller nicht die Mühe machen, eine Lösung für Sie zu entwickeln.
Glücklicherweise ist unser Einfallsreichtum als Raspberry Pi-Enthusiasten grenzenlos.

Auto-Start-Stopp des Motors deaktivieren
Der Benzinverbrauch ist heutzutage ziemlich wichtig, da die Benzinpreise in die Höhe schießen.
Die Autohersteller haben eine Lösung entwickelt, die den Motor abstellt, wenn sie feststellen, dass das Auto im Leerlauf ist. Das hilft dem Auto wirklich, beim Anhalten Benzin zu sparen.
Aber manche Leute ziehen es vor, es nicht zu tragen, und ich kann verstehen, warum.
Vor einiger Zeit war ich in einem modernen Mietwagen unterwegs. Ich stellte fest, dass ich bei aktivierter Start-Stopp-Automatik meinen Bremsdruck "planen" musste, damit ich den Motor starten konnte, bevor die Ampel grün wurde.
Manchmal vergesse ich das und bleibe dann länger bei Grün stehen, als mir lieb ist. Ich kompensierte das, indem ich stärker auf das Gaspedal trat. Nicht empfehlenswert.
Bei einigen Autoherstellern haben Sie keine Möglichkeit, die automatische Start-Stopp-Funktion zu deaktivieren. Wenn Sie sie deaktivieren möchten, müssen Sie bei jeder Fahrt den Knopf drücken.
Jetzt nicht mehr!
Skizze des Projekts
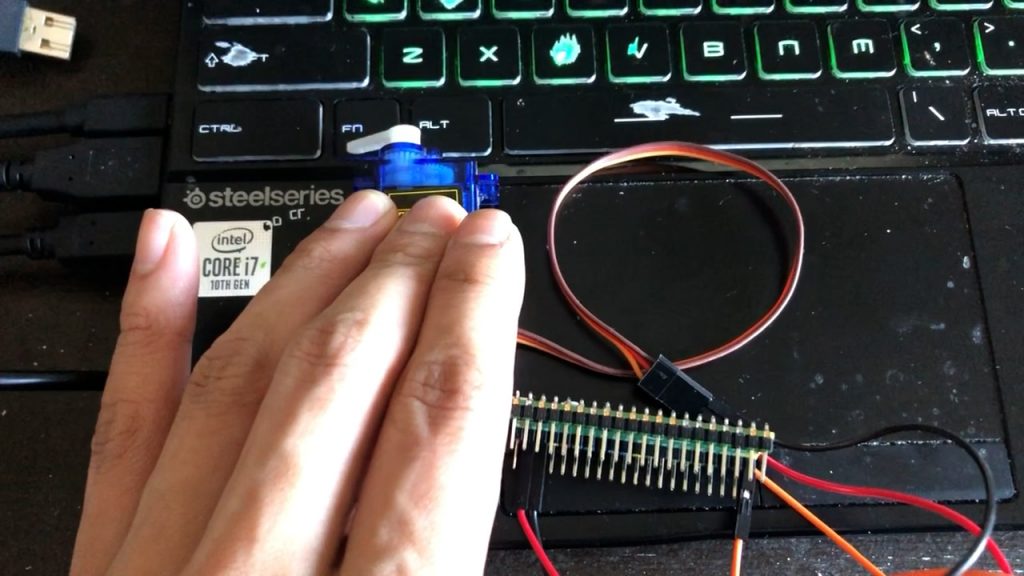
Was Sie im obigen Video sehen, ist ein kommerzielles Produkt, aber es kann leicht mit einem Raspberry Pi Pico und einem SG90-Servo realisiert werden. Die Stromversorgung für den Raspberry Pi Pico kann über die USB-Anschlüsse des Fahrzeugs erfolgen.
Der grundlegende MicroPython-Code ist dieser und setzt voraus, dass Sie die Signalleitung des Servos an GPIO 16 angeschlossen haben.
from time import sleep
from machine import Pin
from machine import PWM
pwm = PWM(Pin(16))
pwm.freq(50)
pwm.duty_ns(2000000)
sleep(0.5)
pwm.duty_ns(500000)
Dies birgt einige Herausforderungen in sich:
Zuerst müssen Sie den Winkel des Servos einstellen. Dieser wird durch den Wert eingestellt, der in pwn_duty_nsdie in Nanosekunden angegeben ist.
2 Millionen Nanosekunden (2.000.000) entsprechen einer vollen Umdrehung und 500.000 einer vollen Umdrehung in die entgegengesetzte Richtung.
Letztendlich habe ich nur 1.000.000 bis 2.000.000 Nanosekunden verwendet und nicht den gesamten Bereich des Servos.
Zweitens müssen Sie wissen, wie Sie die Start-Stopp-Funktion Ihres Autos deaktivieren können. Bei einigen müssen Sie die Taste drücken und gedrückt halten, so dass Sie die schlafen Länge.
Drittens soll es nur funktionieren, wenn der Motor eingeschaltet ist, und nicht, wenn Sie das Radio starten. Dies ist wahrscheinlich die größte Herausforderung, denn es gibt keine einfache Möglichkeit, dem Pico mitzuteilen, wann der Motor eingeschaltet ist.
Aber dasselbe Projekt - der Betrieb eines Servos mit dem Raspberry Pi Pico - kann auch für viele andere Projekte sehr nützlich sein, z. B. für einen Umschalter. Ich verwende genau diese Methode, um im Bett bleiben und das Licht im Schlafzimmer ausschalten.
Oder man kann einen Bildschirmschoner durch Drücken einer beliebigen Taste (wie INSERT) anhalten.
OpenMower: GPS-Roboter-Rasenmäher
"Roboter-Rasenmäher sind scheiße!"
Das sagt Clemens Elflein, der Erfinder von OpenMower.
Er bemängelt, dass diese Robomowers zu dumm sind.
"Im Grunde fahren alle diese Bots in eine zufällige Richtung, bis sie die Rasenkante erreichen, drehen sich für eine zufällige Dauer und wiederholen den Vorgang. Ich denke, wir können das besser!"
Anstelle einer willkürlichen Rasenmähermethode wollte Clemens also etwas Präziseres, indem er GPS einbaute. Der Vorteil dabei ist, dass der Robomower auch autonom in den Garten navigieren und dort mähen kann!
Ein Robomäher ist eine moderne Lösung, um die sich wiederholende Aufgabe des Rasenmähens zu reduzieren. Aber er ist nicht gut genug.
Denken Sie daran, warum Sie dies lesen... moderne Lösungen erfordern modernere Lösungen!
Ziele des Projekts
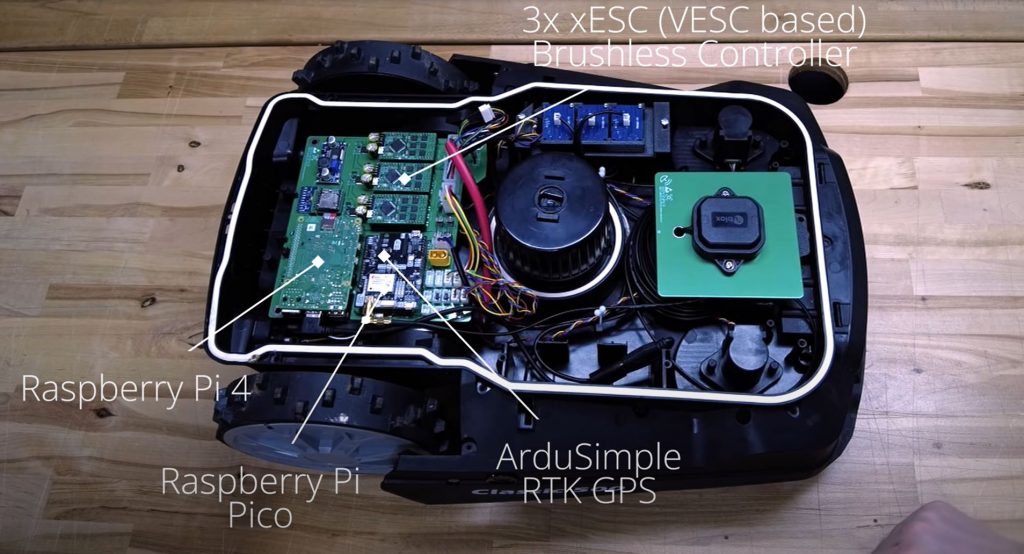
Clemens verwendete ein kommerzielles Produkt namens YardForce Classic 500 und installierte einen Raspberry Pi 4 und einen Raspberry Pi Pico.
Wie auf seiner Githubdas sind seine Ziele:
Autonomes Mähen des Rasens: Natürlich sollte das Gerät in der Lage sein, den Rasen automatisch zu mähen.
- Gute Sicherheit: Das Gerät muss sicher sein, z. B. Not-Aus, wenn es angehoben wird oder abstürzt.
- Kein Begrenzungsdraht erforderlich: Wir wollen flexibel sein und mehrere Mähbereiche unterstützen.
- Niedrige Kosten: Es sollte billiger sein als ein Standardprodukt der mittleren Preisklasse.
- Offen: Ich möchte Wissen weitergeben und anderen ermöglichen, ebenfalls einen OpenMower zu bauen.
- Schön anzuschauen: Sie müssen sich nicht schämen, einen OpenMower Ihren Rasen mähen zu lassen.
- Vermeiden Sie Hindernisse: Der Mäher sollte Hindernisse erkennen und ihnen beim Mähen ausweichen.
- Regen-Erkennung: Das Gerät sollte in der Lage sein, schlechte Wetterbedingungen zu erkennen und das Mähen zu unterbrechen, bis sie sich bessern.
Können Sie das tun?
Clemens hat eine Discord-Gruppe eingerichtet, an der täglich Menschen teilnehmen.
Er rät davon ab, es zu tun, wenn man nicht weiß, was man tut.
Er macht deutlich, dass man nicht an seine Tür klopfen soll, wenn etwas schief geht.
Beitritt zu OpenMowers Diskord oder siehe ihre GitHub.
Keine Kacke, Sherlock: Überengineering bei der Beseitigung von Hundekacke im Garten
Caleb Olson hat einen Corgi, der überall in seinem Garten Kot hinterlässt.
Zunächst entwarf er ein System, das markiert, wo sein Hund Twinkie kackt, und dies auf einem Bild festhält. Eine moderne Lösung.
Doch die moderne Lösung erwies sich als "viel zu aufwendig", da er auf sein Telefon zurückgreifen muss, um sich einen Überblick über die Standorte zu verschaffen.
Was hat er also getan? Er installierte einen Roboterarm mit einem Laser, der anzeigt, wo sich die Kacke befindet.
Moderne Lösungen erfordern modernere Lösungen.
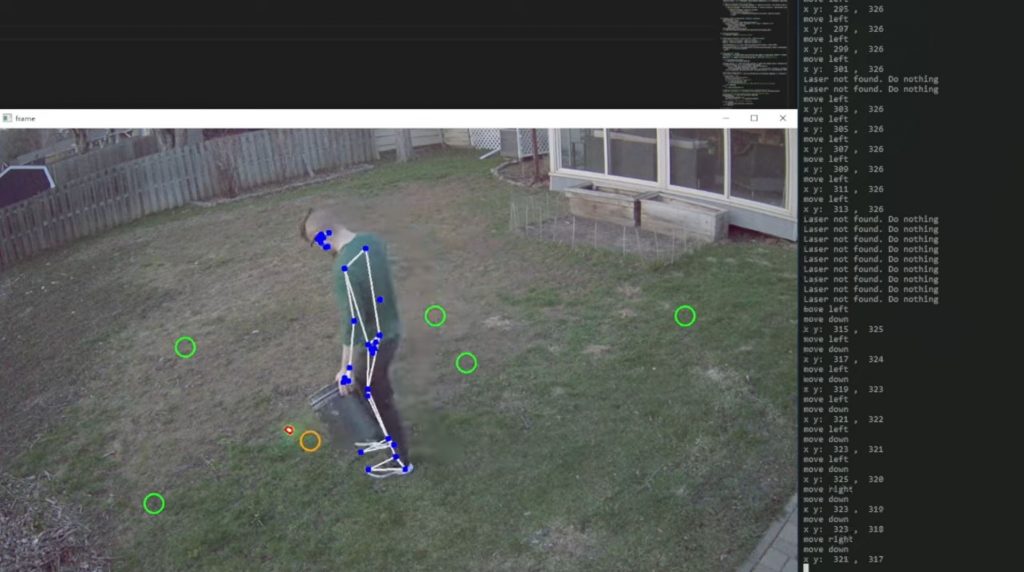

Die Computervision ist für diese Aufgabe von entscheidender Bedeutung, da sie die Kacklaserführung startet. Indem er die Arme verschränkt, startet der Computer das Leitsystem, indem er auf den ersten Kackpunkt zeigt.
Wenn er sich dann bückt, um es aufzuheben, erkennt OpenCV dies und bringt ihn zur nächsten Kackstelle.
Habt ihr eines dieser... Projekte?
Ich durchforste täglich Reddit, Twitter und andere Websites, um interessante Projekte für den PiCockpit Newsletter zu finden.
Schauen Sie sich auch unsere Paragon Projects-Serie an hier.
Wenn Sie ein interessantes Projekt kennen, hinterlassen Sie unten einen Kommentar 👇.
Wenn Ihnen diese Serie gefällt, melden Sie sich unten für unseren Newsletter an 👇.