Zbuduj rękawicę wirtualnej rzeczywistości

Jeśli chcesz dowiedzieć się więcej o VR, to jest to najfajniejszy projekt, jaki znajdziesz. W tym artykule pokażemy, jak zbudować programowalną rękawicę wirtualnej rzeczywistości.
Rękawica jest oparta na Raspberry Pi Pico, a PRZETWORNIK ADC MCP3008 oraz pięć czujników elastycznych, które można zbudować samodzielnie!
Co będzie potrzebne
Poniżej znajduje się lista rzeczy potrzebnych do tego projektu
- Raspberry Pi Pico
- Kabel MicroUSB / USB
- PRZETWORNIK ADC MCP3008
- Pięć czujników elastycznych
- Jakiś przewód lub zworka
- Pięć rezystorów 330Ω
- Sprzęt do lutowania (opcjonalnie)
- Płytka robocza (opcjonalnie)
Jeśli wolisz wideoprzewodnik to mamy dla Ciebie rozwiązanie.
Zbuduj czujniki giętkie
Ponieważ większość czujników giętkich kosztuje około 10$ za sztukę, o wiele taniej jest zbudować je samemu.
Ten film pokazuje, jak to zrobić, choć wprowadziliśmy pewne zmiany, aby poprawić wydajność.
Zastąp wewnętrzny pasek papieru velostatem, a folię aluminiową taśmą miedzianą. Wykonaj również bardzo cienkie paski (około 1 mm dla taśmy miedzianej i 2 mm dla velostatu), aby zwiększyć rezystywność czujnika. Większa rezystywność prowadzi do większej rozdzielczości.

Możesz również przylutować obwód dzielnika napięcia, aby usunąć kilka przewodów z płytki drukowanej. Do jednego końca przylutuj czerwony przewód. Odczytany przewód będzie stykiem dodatnim. Do drugiego końca przylutuj żółty przewód. Za żółtym przewodem należy przylutować rezystor 330 Ohm, który będzie połączony z masą.
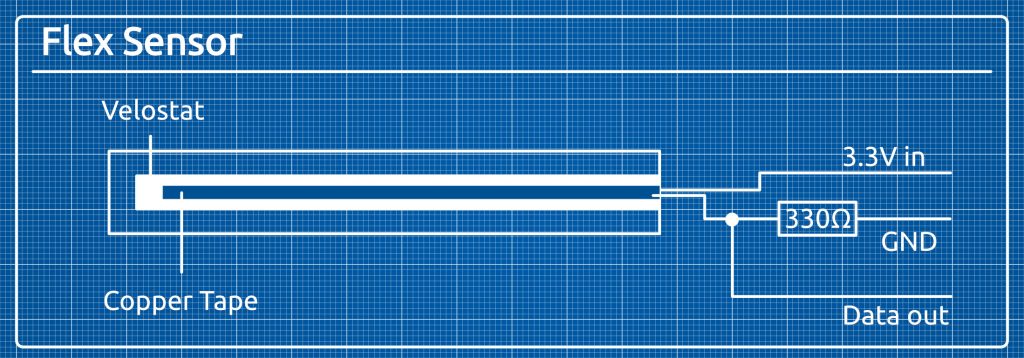
W moim przypadku rezystor znajduje się na końcu czarnego przewodu i zaizolowałem go rurką termokurczliwą.
Żółty przewód będzie służył jako kabel do transmisji danych.
Układ dzielnika napięcia
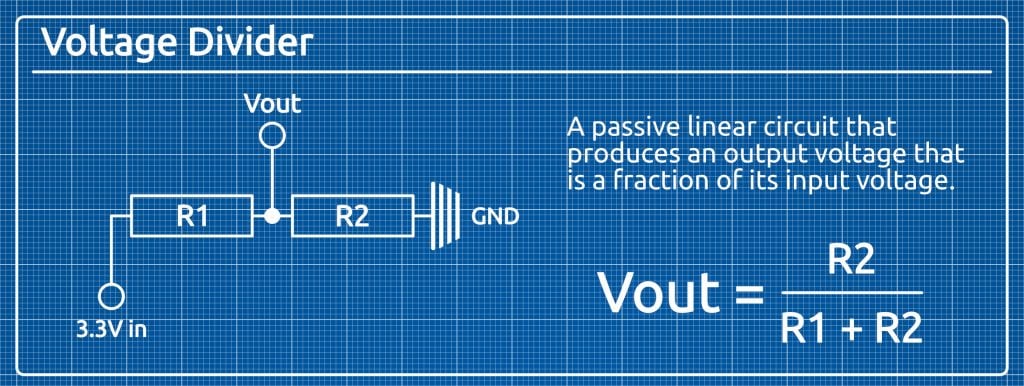
Obwód dzielnika napięcia jest powszechnie stosowany w urządzeniach wbudowanych. Składa się on z dwóch rezystorów połączonych szeregowo, między którymi znajduje się złącze wyjściowe.
Wyprowadza on ułamek napięcia wejściowego, a dokładna wartość zależy od rezystywności obu rezystorów.
Okablowanie
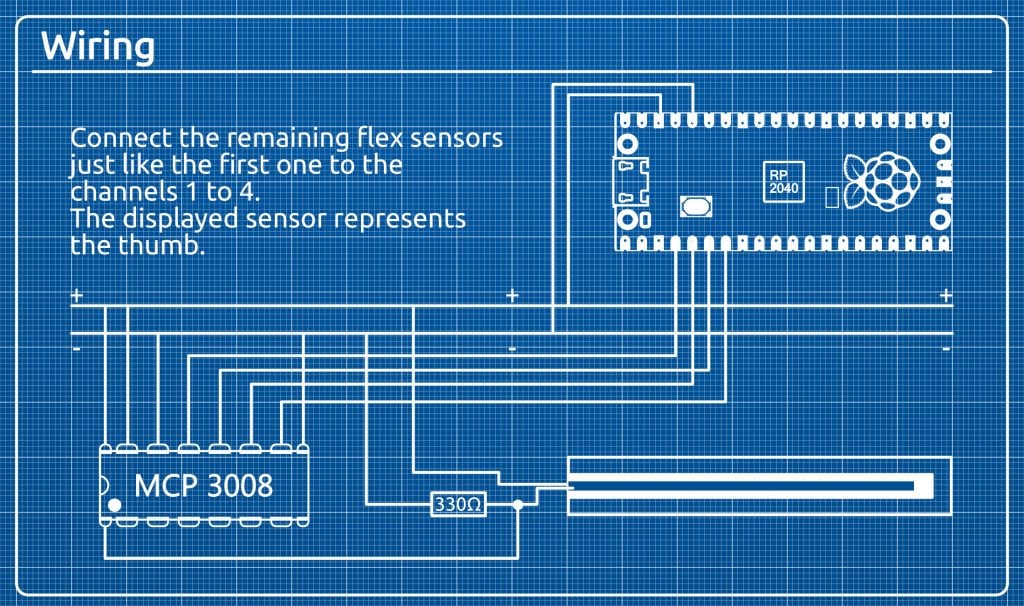
Podłącz MCP3008 do Raspberry Pi Pico zgodnie z poniższą grafiką.
Krok po kroku wyjaśniliśmy to w nasze wideo.
Podłącz czujniki giętkie tak, jak na rysunku. Osiem pinów po lewej stronie MCP3008 to kanały od 0 do 7 (od góry do dołu). Podłącz przewód danych czujnika giętkiego kciuka do kanału 0, palca wskazującego do kanału 1, palca środkowego do kanału 2, palca serdecznego do kanału 3, a palca małego do kanału 4.
Jeśli chcesz zmienić kolejność lub dodać dodatkowe czujniki, musisz zmienić oprogramowanie w urządzeniu Pico.
Konfiguracja oprogramowania VR Glove
Konfiguracja urządzenia Pico
W tym układzie MCP3008 konwertuje sygnał analogowy z czujnika giętkości na sygnał cyfrowy. Następnie urządzenie Pico odczytuje dane i wysyła je do komputera PC z systemem Windows przez port szeregowy USB.
W przypadku Pico użyjemy Circuit Python, ponieważ zawiera on moduł MCP3008, który bardzo ułatwia pracę. Aby zainstalować Circuit Python na swoim Pico, pobierz plik .uf2 plik z Oficjalna strona Pico Circuit Python.
Podłącz urządzenie Pico przez USB, trzymając wciśnięty przycisk BOOTSEL przycisk. Następnie przeciągnij i upuść .uf2 plik na Pico. Pico zostanie ponownie zamontowane jako CIRCUITPY.
Pobierz i rozpakuj mcp3xxx Biblioteka Circuit Python zawierająca -mpy- z ta strona.

Zawiera on folder lib, który należy skopiować na dysk Pico (który jest teraz dyskiem CIRCUITPY).
Następnie należy pobrać skrypt code.py z naszej strony Repozytorium GitHub i skopiuj go na płytę Pico.
Teraz przy każdym włączeniu zasilania urządzenia Pico (bez przytrzymanie przycisku BOOTSEL) odczyta pierwsze pięć kanałów z MCP3008 i wyśle dane do portu szeregowego USB.
Konfiguracja blendera
Następnym krokiem jest zainstalowanie Blendera dla Twojego systemu operacyjnego. Ten przykład został przetestowany dla systemu Windows, ale powinien działać także na innych systemach operacyjnych, po wprowadzeniu kilku drobnych modyfikacji.
Potrzebujemy modułu PySerial Pythona, aby odczytać dane szeregowe z Pico w naszym skrypcie Pythona. Blender posiada własną wersję Pythona. Upewnij się, że zainstalujesz tam PySerial.
Sprawdź nasze wideo aby dowiedzieć się, jak zainstalować PySerial w Blenderze w systemie Windows.
Teraz pobierz hand.blend z naszego GitHuba i otwórz go w Blenderze.
Po lewej stronie powinieneś zobaczyć rękę 3D, a po prawej skrypt Pythona. W linii 73 tworzony jest obiekt "Serial". Musisz przekazać do niego nazwę portu szeregowego USB (w moim przypadku był to "COM4").
Wniosek
Chcesz zobaczyć inne projekty, które można wykonać za pomocą Raspberry Pi Pico?
Sprawdź naszą serię Paragon Projects, klikając ten przycisk:
Co zrobisz ze swoją nową rękawicą wirtualnej rzeczywistości?