PiCockpit v2.6.5 - Stöd för Pico W (del 2)
Som ni säkert alla vet så designade Raspberry Pi Foundation sin egen mikrokontroller för tre år sedan - Raspberry Pi. Raspberry Pi Pico. Här kommer vi att berätta om vårt nya stöd för Pico W genom PiCockpit!
Vi blev genast fascinerade, särskilt av det låga priset (från $4) och den låga energiförbrukningen, i kombination med det breda utbudet av möjliga tillämpningar - från personliga experiment och projekt till industriella användningsområden som kräver hundratals eller till och med tusentals av dem.
Men i sin första version var Pico inte precis lätt att ansluta till internet (eller något slags intranät). Du behövde ett tilläggskort för att ge den LAN, WiFi eller någon annan typ av nätverkskapacitet.
I början av året släppte Raspberry Pi den nya Pico W, samma kretskort, men med ett inkluderat WiFi-chip som gör det enkelt att ansluta den till internet. Förutom denna hårdvaruuppdatering blev stödet för Micropython bättre och bättre.
Micropython? Det är en implementering av programmeringsspråket Python som är optimerad för att köras på en mikrokontroller (i princip en liten dator utan operativsystem). Som några av er kanske redan vet är Python och därmed Micropython mycket nybörjarvänliga språk, som gör det möjligt att skriva både små och komplexa program utan problem och med stor prestanda, tack vare en mycket väl optimerad miljö. Dessutom finns det en mycket vänlig och livlig gemenskap som utökar språket och hjälper nykomlingar med råd och tips.
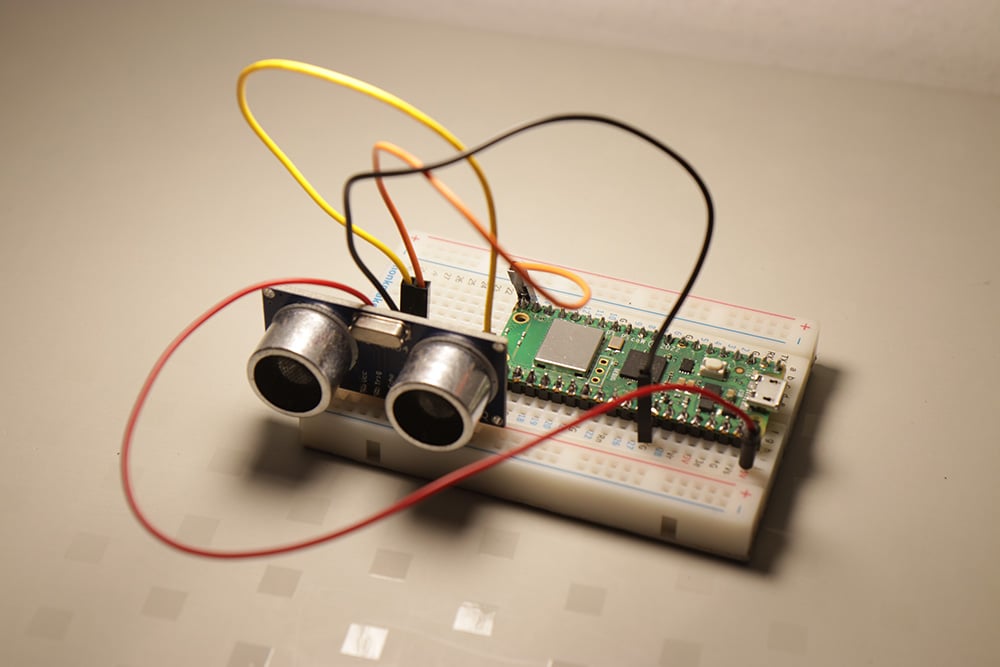
Så vi gjorde det äntligen! PiCockpit kan nu köras på Pico! Du kan använda vårt webbgränssnitt för att övervaka din Pi med PiStats-appen. Vår CO2-sensor stöds också och möjliggör fjärrövervakning av din miljö! Men enligt min personliga åsikt är markera är fjärranvändningen av GPIO-stiften.
Vi har stöd för att läsa statusen på ingångsstiften, ställa in utgångsstiften och till och med använda PWM för att styra de externa enheter som du har kopplat in.
Och vi arbetar för närvarande på ännu fler coola funktioner som kommer att släppas snabbt tack vare Micropython som gör utvecklingen snabb och testningen ännu snabbare!
Och det bästa? Den är lika trivialt och bekvämt som att använda ett USB-minne. Med ungefär fem klick har du din Pico W igång! Är du intresserad? Jag ska visa dig hur man gör!
Installationsguide
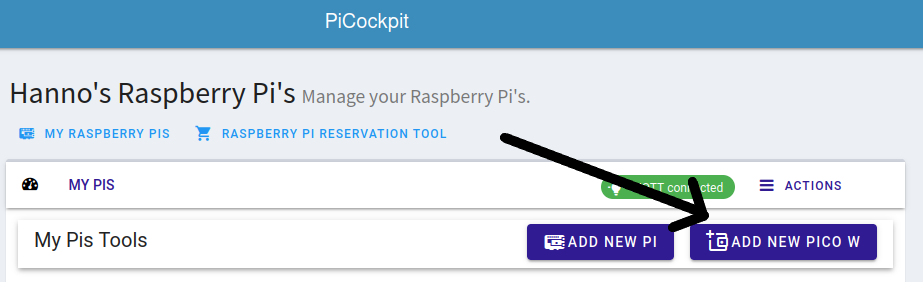
Logga först in på ditt konto på picockpit.com. På din PiCockpit-hemsida bör du se en ny knapp som heter "Lägg till ny Pico W". Klicka på den!
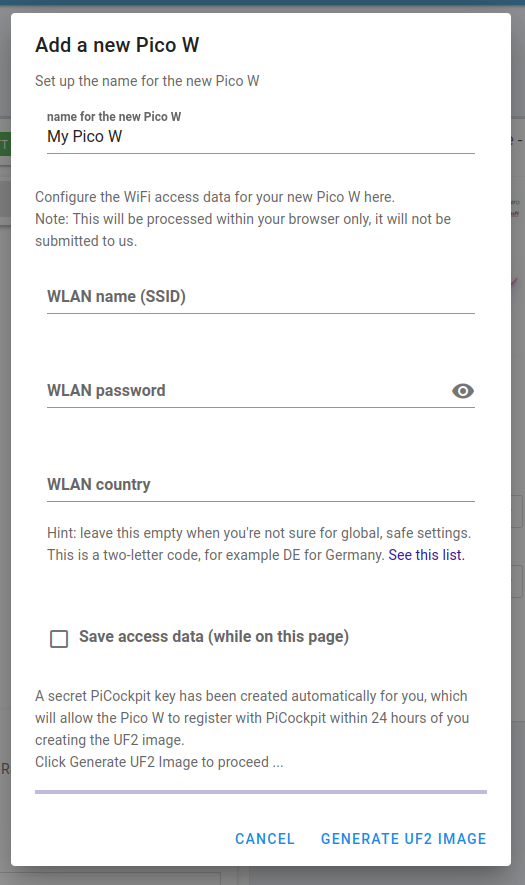
Efter att ha bekräftat ditt lösenord kan du ange ett namn för din Pico, dina WLAN-uppgifter och det land du använder din Pi i - om du inte är säker på vilken kod du ska använda kan du lämna det tomt. Klicka på 'Generera en uf2-bild' så redigerar vi vår uf2-bild så att den innehåller dina autentiseringsuppgifter och låter dig ladda ner den. Det bästa? Detta kommer att behandlas lokalt inom din webbläsarekommer den inte att lämnas in till oss. Dina uppgifter är alltså säkra och kommer inte att delas på internet!
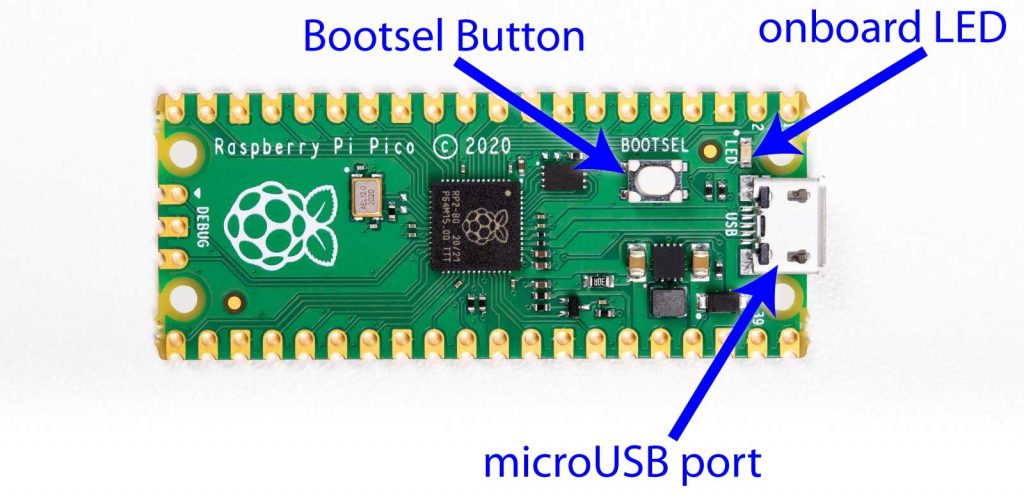
Därefter trycker du helt enkelt på BOOTSEL-knappen för att be Pico att konfigurera sig själv som en masslagringsvolym och ansluta den till datorn precis som om du ansluter ett USB-minne eller något liknande. Beroende på ditt operativsystem bör den bara dyka upp som en extern volym!
Kontrollera sedan att Pico är inställd på fabriksinställningarna. Om din Pico W är helt ny kan du helt enkelt strunta i detta steg. Annars kan du ladda ner den här Flash Nuke uf2 och kopierar den till Pico. Det är bara att dra och släppa den nedladdade filen till volymen.
Vänta sedan i ungefär 10 sekunder så försvinner Pico och dyker sedan upp igen. Den bör dyka upp som en volym, precis som tidigare.
Dra nu helt enkelt din nedladdade uf2-fil (picockpit-picow-v2.5.0.uf2) på volymen. Det var allt!
Det enda som återstår är att vänta. Koppla inte bort Pico! Vänta bara en minut (eller två!). Först ska Picos lysdiod tändas. Efter en stund bör den inbyggda lysdioden börja lysa. blinkar snabbt. Då dyker Pico upp i PiCockpit-gränssnittet - och du kan använda den precis som du är van vid att använda Pis i full storlek. Klart!

Kommande
Detta är naturligtvis vår första version av Pico PiCockpit Client. Det finns fortfarande några problem att lösa - om du skulle stöta på eventuella problem kontakta denna sidan - Där hittar du mer detaljerade instruktioner som hjälper dig att komma igång! Jag kommer också att lägga till kända buggar (och förhoppningsvis hur du kan kringgå dem). Dessutom får du gärna skicka oss en E-post! Oavsett om det handlar om problem som du stöter på eller om en idé som du vill att vi ska titta på? Vi är alltid glada över att ta emot all slags feedback!
Som du säkert kan höra är vi väldigt, väldigt glada över den här utgåvan. Att arbeta med Pico W kan vara lite skrämmande för nybörjare och lite krångligt för mer erfarna utvecklare. Vi hoppas kunna effektivisera detta för alla, vilket ger enkel tillgång till Raspberrys nyaste (och enligt min personliga åsikt kanske deras coolaste!) produkt hittills.
Och de coola kommande funktionerna som jag nämnde? Nästa sak du kan se fram emot är en version av PiControl som gör det möjligt för dig att köra dina egna Micropython-skript från vårt bekväma webbgränssnitt. Tänk bara på det! Det där GPIO-skriptet du skrev förr i tiden? Ett klick. Din lilla webbapplikation som pingar din server för att se om den fortfarande är online? Ett klick!
Så där har du det - PiCockpit-stöd för Pico W!
Vill du prova det men har ingen Pico W? Vi säljer dem i vår butik för så lite som 8€ per styck! Du kan också hitta ett stort antal accessoarer och kit för tillverkare är ett bra ställe att börja. Det finns också en version med lödda ledningar, så du behöver inte göra någon lödning själv. Ta en titt runt!
Jag har en iMac med version 10.13.6 (High Sierra).
Leider wird mein Pico W im PiCockpit nicht angezeigt. die OnBoard-LED ist zunächst an und blink nach einer Weile jeweils 4mal. Der Pico W meldet sich im WLAN an und lässt sich auch anpingen. I Thonny wird das hier angezeigt:
Spårning (senaste anropet senast):
Fil "main.py", rad 70, i
Fil "main.py", rad 68, i __init__
Fil "setup.py", rad 246, i setupfunc
Fil "core.py", rad 427, i error_blink
Fil "core.py", rad 444, i blink
KeyboardInterrupt:
MicroPython v1.19.1-789-ga322ebafc på 2023-03-10; Raspberry Pi Pico W med RP2040
Skriv "help()" för mer information.
>>>
Wir haben vor kurzem ein neues Release gemacht - das die Stabilität weiter verbessert hat, bitte probieren Sie Sie es aus - es sollte bei Anlage eines neuen Pico W automatisch als UF2 heruntergeladen werden. Bitte löschen Sie den alten Pico W dafür.